基于TMS320F2812的PCI运动控制卡硬件设计
93 浏览量
更新于2024-09-01
收藏 213KB PDF 举报
"本文主要探讨了基于DSP的PCI通用运动控制卡的硬件设计,采用TMS320F2812 DSP为核心处理器,利用PCI9052接口芯片实现与上位机的高速通讯,旨在满足高精度和实时性的控制需求。"
在现代工业自动化领域,基于数字信号处理器(DSP)的运动控制卡扮演着至关重要的角色。TMS320F2812是由德州仪器(TI)推出的高性能32位定点DSP,其拥有高速的处理能力,核心电压低,指令周期短,且配备有丰富的内存和I/O资源,这些特性使其成为运动控制应用的理想选择。
运动控制卡的核心硬件结构通常包括DSP处理器、运动控制器、总线接口和外围电路。TMS320F2812 DSP作为核心处理器,负责执行复杂的控制算法,如位置环、速度环和电流环的闭环控制。LM628运动控制器则辅助处理位置反馈信号,适用于增量式编码器的伺服系统,提供高效的反馈机制,确保系统的精确控制。
在硬件设计中,PCI总线接口是连接DSP与上位机的关键。PCI9052芯片作为一个专用的PCI接口控制器,能够实现DSP与基于PCI总线的上位机之间的高速数据传输。PCI总线以其高速传输速率和良好的兼容性,确保了实时控制指令的快速传递和实时数据的高效交换。
为了实现多轴控制,设计通常会扩展硬件结构,使得控制卡可以支持三个或更多的伺服电机轴。每个轴都可以独立执行位置、速度控制以及直线和圆弧插补等高级运动任务。这种设计思路极大地简化了上位机的负担,上位机只需要处理高级控制策略和管理任务,而将实时性强、计算密集的控制任务下放到运动控制卡来完成。
驱动程序的设计也是整个系统中不可或缺的一部分。它不仅需要适配硬件接口,实现设备初始化、数据传输等功能,还需要提供友好的API接口,方便上位机应用程序调用。驱动程序通常包含设备枚举、中断处理、DMA传输等关键模块,确保了控制卡的稳定运行和高效性能。
总结来说,基于DSP的PCI通用运动控制卡通过TMS320F2812 DSP的强大计算能力、PCI9052的高速接口和LM628的精确反馈控制,实现了高性能的运动控制,广泛应用于工业自动化、机器人控制等领域。这样的设计不仅提升了系统的实时响应和精度,还降低了上位机的计算压力,使得整个运动控制系统更加灵活、高效。
单片机与单片机与DSP中的基于中的基于DSP 的的PCI 通用运动控制卡的硬件设计通用运动控制卡的硬件设计
摘要:本文提出了一种基于TMS320F2812 的PCI 总线通用运动控制卡的设计方案。详细介绍了运动控制卡的硬
件结构,并对控制卡的配置进行了深入分析,给出了具体的配置参数。最后,介绍了板卡驱动程序的设计方
法。采用DSP 和PCI 结合的方式,实现了上下位机的高速通讯,并充分发挥了DSP 强大的运算能力和极高的处
理速度,以保证控制卡对实时性和精度的苛刻要求。 1 引言 随着 DSP 技术的飞速发展,以其为核心
的多轴运动控制卡越来越广泛的应用在运动控制系统中。上位机只需对被控对象实施总体的控制和管理,而位
置反馈信号的采集、闭环控制的计算和控制量的输出均由运动控制卡完成,这极大地提高了
摘要:本文提出了一种基于TMS320F2812 的PCI 总线通用运动控制卡的设计方案。详细介绍了运动控制卡的硬件结构,
并对控制卡的配置进行了深入分析,给出了具体的配置参数。最后,介绍了板卡驱动程序的设计方法。采用DSP 和PCI 结合
的方式,实现了上下位机的高速通讯,并充分发挥了DSP 强大的运算能力和极高的处理速度,以保证控制卡对实时性和精度
的苛刻要求。
1 引言
随着 DSP 技术的飞速发展,以其为核心的多轴运动控制卡越来越广泛的应用在运动控制系统中。上位机只需对被控对象
实施总体的控制和管理,而位置反馈信号的采集、闭环控制的计算和控制量的输出均由运动控制卡完成,这极大地提高了运算
速度和控制响应速度。本文设计的运动控制卡以TI 公司的32 位定点DSP TMS320F2812 为核心处理器,辅以运动控制器
LM628,通过PCI 总线专用接口芯片PCI9052 与上位机通信,实现3 轴(可扩成多轴)伺服电机的控制,完成位置、速度控制以
及直线、圆弧插补功能。本文将对运动控制卡的硬件设计进行详细的介绍。
2 运动控制卡的硬件结构
TMS320F2812 是基于TI 公司最新的C28x 内核而设计的。与其他的处理器相比,其具有如下一些特点:采用低功耗设
计,核心电压仅1.8V~1.9V,显著降低了功耗,指令周期可达6.67ns;新增了扩展控制寄存器以实现各种增强功能;多达
128K×16 位的Flash 存储器,足够用于存储程序和数据变量;56 个可编程或复用的通用I/O。
LM628 是NSC 公司专为使用增量式编码器作为位置反馈的伺服机构而设计的一种芯片,其集成度高,需要外围部件少,
易于调试。主要特点如下:具有32 位位置、速度和加速度寄存器;带有16 位参数的可编程数字PID 控制器;可编程微分采样
间隔;运动过程中可改变速度、预期位置和PID 控制器参数;实时可编程的主机中断。
PCI9052 是PLX 公司推出的低成本、低功耗、32 位PCI 总线专用目标接口芯片。其兼容PCI V2.1 协议特性,可与多种局
部总线相连;支持复用或非复用的8/16/32 位局部总线;支持4 个局部片选信号和5 个局部地址空间;支持两个来自局部总线
的中断,可生成一个PCI 中断;支持局部总线等待状态,附加的LRDYi#握手信号可用于产生各种等待状态。运动控制卡的总
体硬件结构如图 1 所示。其中,DB 为数据总线,AB 为地址总线,CB为控制总线,CS-1~CS-4 为片选信号,XA0 为DSP 经
电平转换后的最低位地址线。
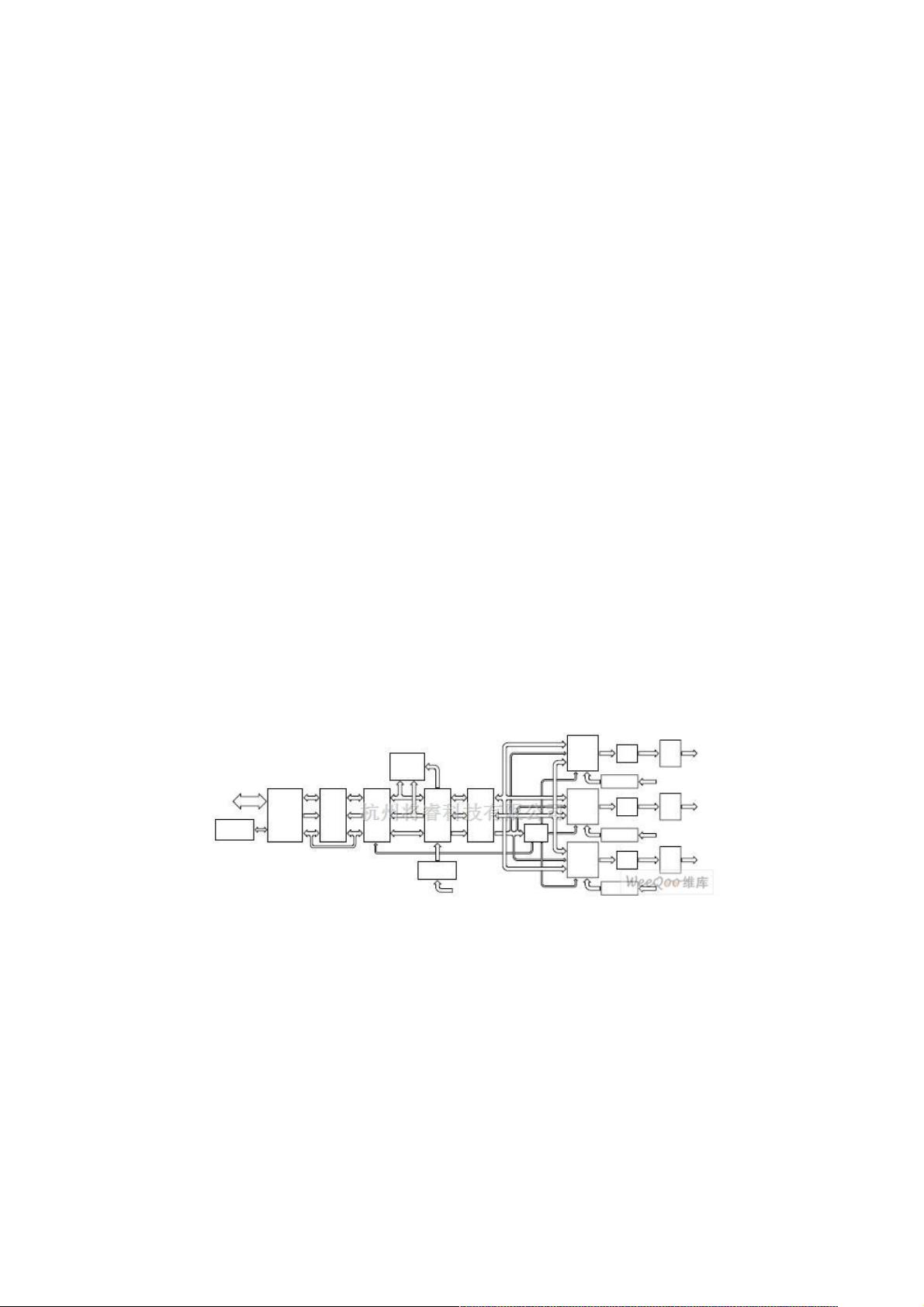
图 1 运动控制卡的总体硬件结构
从图中可以看出 PCI 接口芯片的PCI 总线端直接与金手指相连,局部总线端则通过双端口RAM 与DSP 相连,构成16 位
存储转换电路。DSP 分别与三片LM628 相连,与其配合以实现3 轴运动控制。这样既解决了DSP 因系统资源不足不能控制多
轴的问题,又弥补了LM628 单独控制时总线传输延时的缺点。LM628 的数字量输出经数/模转换和电压放大后转换为交流伺服
驱动器可以接收的模拟电压信号(-10V~+10V)。而伺服电机增量式光电编码器的反馈经差分电路滤波并合成单端信号接入到
LM628 中,以构成位置闭环控制。
下载后可阅读完整内容,剩余3页未读,立即下载
2020-11-10 上传
2020-11-10 上传
2020-12-09 上传
2020-11-10 上传
2020-11-10 上传
2020-11-10 上传
2020-10-19 上传
2020-12-08 上传
2020-12-01 上传

weixin_38712908
- 粉丝: 6
- 资源: 931
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java毕业设计项目:校园二手交易网站开发指南
- Blaseball Plus插件开发与构建教程
- Deno Express:模仿Node.js Express的Deno Web服务器解决方案
- coc-snippets: 强化coc.nvim代码片段体验
- Java面向对象编程语言特性解析与学生信息管理系统开发
- 掌握Java实现硬盘链接技术:LinkDisks深度解析
- 基于Springboot和Vue的Java网盘系统开发
- jMonkeyEngine3 SDK:Netbeans集成的3D应用开发利器
- Python家庭作业指南与实践技巧
- Java企业级Web项目实践指南
- Eureka注册中心与Go客户端使用指南
- TsinghuaNet客户端:跨平台校园网联网解决方案
- 掌握lazycsv:C++中高效解析CSV文件的单头库
- FSDAF遥感影像时空融合python实现教程
- Envato Markets分析工具扩展:监控销售与评论
- Kotlin实现NumPy绑定:提升数组数据处理性能
