安川机器人YRC1000micro上安装PROFIBUS通信指南
需积分: 10 139 浏览量
更新于2024-07-10
收藏 3.33MB PDF 举报
在YRC1000micro型安川机器人上安装PROFIBUS通信涉及两个主要的基板类型:INpact和AB3602。INpact基板适用于从站功能,而AB3602基板则作为主站,提供了更高级的通信能力和PROFINET支持。
首先,准备工作是至关重要的。用户需要确保已准备好所需的INpact基板或AB3602基板,以及十字螺丝刀等安装工具。在安装过程中,务必先断开控制柜电源,然后按照指示拧下顶部盖板上的螺丝,并拆下预装的铁片,以便于基板的插入。
对于AB3602基板,安装时需要将其插入指定的卡槽,并确保牢固固定。安装完成后,如果使用的是AB3602,需要在维护模式下使用AnybusNetToolfor PROFINET工具进行配置,同时使用串行电缆将PC连接到基板。INpact基板则可以直接连接PROFIBUS线缆,简化了安装流程。
在操作示教器时,用户需进入维护模式和安全模式。通过主菜单进入【系统】->【设置】->【选项基板】,选择相应的基板型号,如INpact或AB3602。在基板设定界面中,用户需要设置基板的使用状态,包括IO模块的大小。对于INpact基板,还需要设定其作为从站的节点地址,这是为了确保PROFIBUS网络的正确通信。
安装过程需要严格按照顺序进行,包括硬件的安装、软件的配置和参数的设定。正确的安装不仅能让机器人与外部设备无缝通信,还能确保系统的稳定性和效率。在整个过程中,理解并遵循Yaskawa Electric China Corporation提供的官方指南至关重要,以避免潜在的错误和故障。
© YASKAWA Electric (CHINA) Corporation
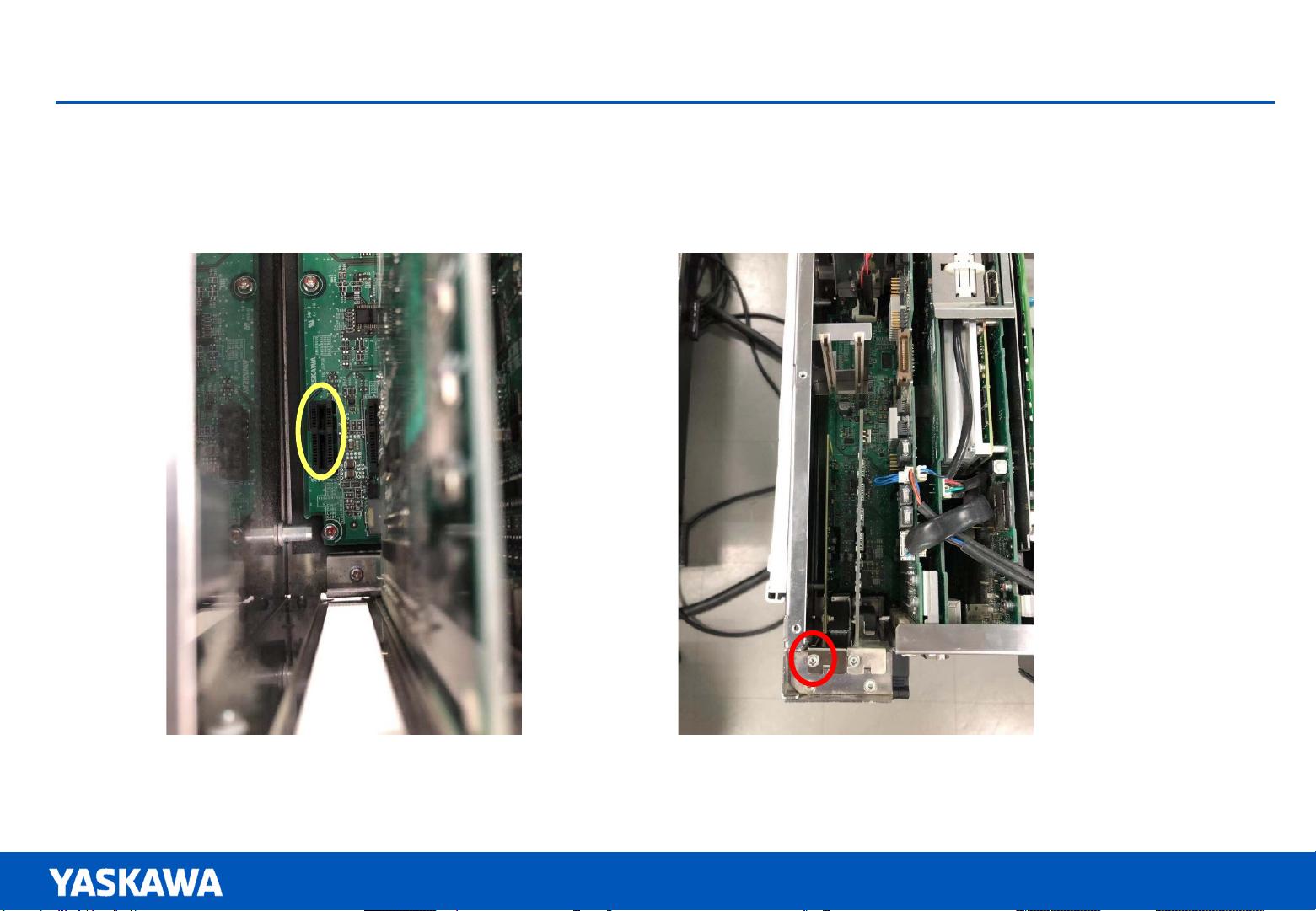
PROFIBUS基板安装步骤
1.4将基板插入下图的黄色圈标识的卡槽,拧紧安装螺钉。
剩余23页未读,继续阅读
2022-01-15 上传
2021-04-28 上传
2019-07-05 上传
2018-11-26 上传
2021-02-27 上传
2023-08-15 上传
2023-09-25 上传
2024-01-08 上传

OCEAN__
- 粉丝: 52
- 资源: 18
 我的内容管理
展开
我的内容管理
展开







最新资源
- IEEE 14总线系统Simulink模型开发指南与案例研究
- STLinkV2.J16.S4固件更新与应用指南
- Java并发处理的实用示例分析
- Linux下简化部署与日志查看的Shell脚本工具
- Maven增量编译技术详解及应用示例
- MyEclipse 2021.5.24a最新版本发布
- Indore探索前端代码库使用指南与开发环境搭建
- 电子技术基础数字部分PPT课件第六版康华光
- MySQL 8.0.25版本可视化安装包详细介绍
- 易语言实现主流搜索引擎快速集成
- 使用asyncio-sse包装器实现服务器事件推送简易指南
- Java高级开发工程师面试要点总结
- R语言项目ClearningData-Proj1的数据处理
- VFP成本费用计算系统源码及论文全面解析
- Qt5与C++打造书籍管理系统教程
- React 应用入门:开发、测试及生产部署教程
