机电系统仿真实验:曲柄滑块机构运动学分析
"本实验报告主要涉及曲柄滑块机构的运动学仿真分析,包括基于Matlab Simulink和ADAMS的两种仿真方法。实验旨在让学生掌握建立机电系统运动学模型以及进行仿真分析的技术。实验内容包括曲柄匀速和加速度运动两种情况下的滑块位移和速度计算,并通过ADAMS建立实体模型进行验证。"
实验一:曲柄滑块机构的运动学仿真分析(基于Simulink)
在实验一中,学生需要根据给定的曲柄滑块机构参数(r2=120mm,r3=440mm),建立系统的数学模型。首先,要建立闭环矢量方程R2+R3=R1,并将其投影到x、y坐标轴上,得到速度方程。通过对速度方程求导,得到加速度方程。然后,利用Simulink构建相应的仿真模型,输入曲柄的角速度(w2=150rad/s)和加速度函数,求解滑块的位移和速度曲线。初始状态为曲柄和滑块的位置。
实验二:曲柄滑块机构的运动学仿真分析(基于ADAMS)
在实验二中,学生需基于ADAMS软件创建曲柄滑块机构的实体模型。同样,考虑曲柄的匀速运动和加速度运动,通过在曲柄上添加相应的运动函数,进行运动学仿真,测量滑块的位移和速度。这一步骤将与Simulink的结果进行对比,以验证两种仿真方法的一致性和准确性。
实验对比与分析:
完成两个实验后,对比Simulink和ADAMS得到的滑块位移和速度曲线,分析两者之间的差异,探讨可能的原因,如数值积分误差、模型简化等。此外,还需讨论两种仿真工具各自的优点和适用场景,例如Simulink在数学建模和控制系统的仿真上有优势,而ADAMS则更擅长于实体动力学的模拟。
总结:
这个实验系列着重于理解曲柄滑块机构的运动学特性,以及如何使用Matlab Simulink和ADAMS这两种强大的仿真工具进行分析。通过实际操作,学生能够深入学习到机械系统动态行为的建模与仿真技术,为后续的机电一体化设计和分析打下坚实基础。同时,对比不同仿真方法的结果,有助于提高学生的分析能力和问题解决技巧。
0
3322
13322
sqrsqr
rcqrcqr
[1]
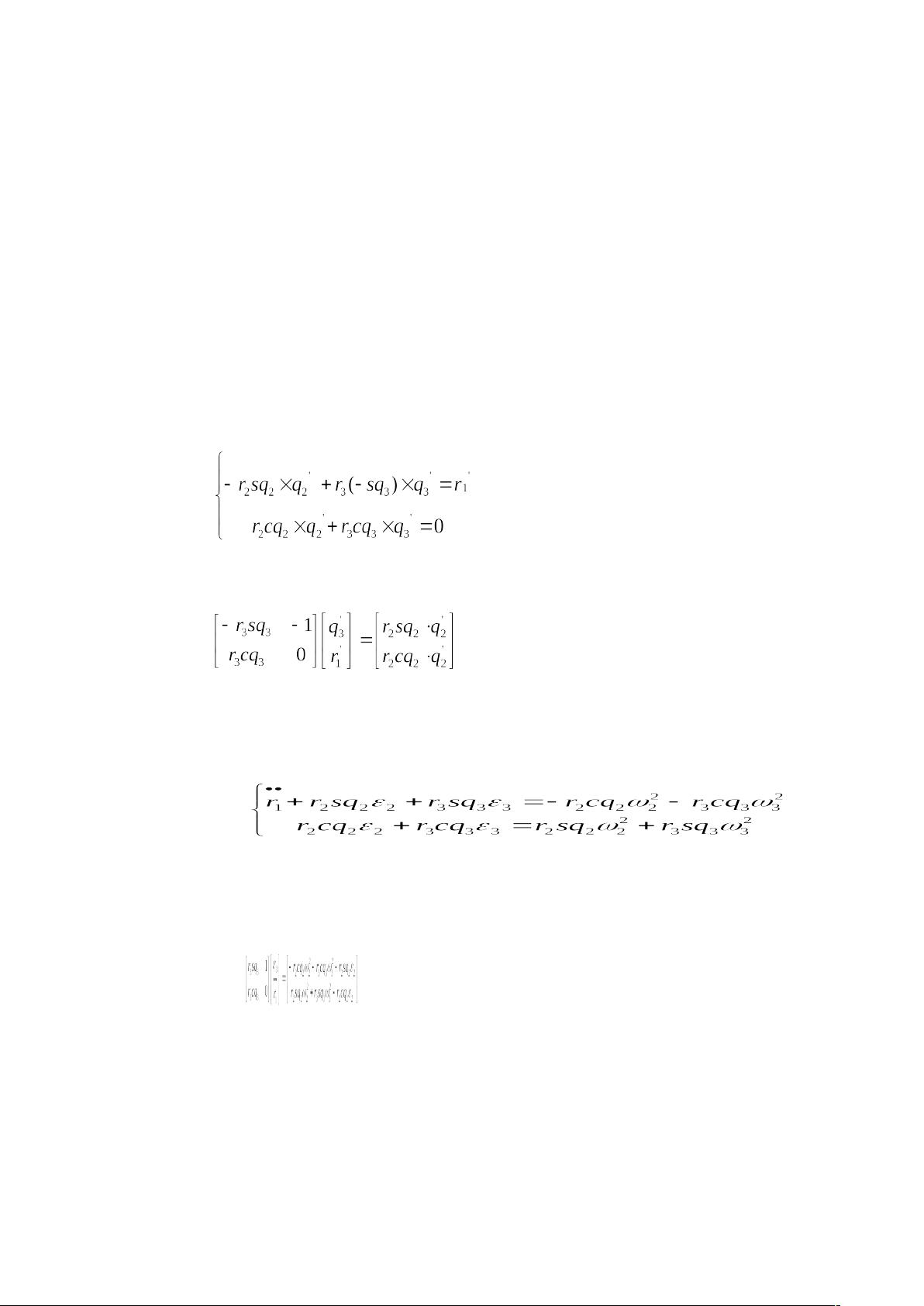
(2)求导建立曲柄滑块机构的的速度方程
对【1】式求一介导可得
[2]
[2]式即为曲柄滑块机构的速度方程
[3]
[3]式为速度的矩阵约束方程
(3)求导建立曲柄滑块机构的的加速度方程
[4]
[4]式为曲柄滑块机构的加速度方程
[5]
[5]式为加速度的矩阵约束方程
剩余11页未读,继续阅读
相关推荐






a646272352
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- InfoQ中文站:Struts2入门指南
- 探索函数式编程:Haskell语言实践
- 在Linux AS4上安装MySQL 5.0.27的详细步骤
- Linux环境下安装配置JDK1.5、Tomcat5.5、Eclipse3.2及MyEclipse5.1指南
- MapGIS 7.0:嵌入式GIS开发平台详解与关键技术
- MATLAB编程风格与最佳实践
- 自顶向下语法分析方法:LL(1)文法与确定性分析
- Tapestry实战指南:探索动态Web应用开发
- MyEclipse安装指南:JDK与Tomcat设置详解
- Adobe Flash Video Encoder 中文指南
- 测试环境搭建与管理:要求、备份与恢复
- C语言经典编程习题解析:从100例中学习
- 高质量C/C++编程规范与指南
- JSP驱动的个性化网上书店系统开发与实现
- MediaTek MTK入门教程:软件架构与开发流程解析
- 学习Python:第二版详细指南
