"ROS机器人学习_58:实用知识库分享与仿真探索"
版权申诉
2 浏览量
更新于2024-02-29
收藏 5.9MB PDF 举报
本篇资料主要介绍了ROS机器人学习中的实用知识,共包含11篇文章,涵盖了ROS-Gazebo开源四足机器人仿真模型、四足机器人项目改进、姿态控制仿真、IMU插件使用与数据采集、Cartographer ROS官方文档翻译学习、四足机器人SLAM仿真、机械臂控制探索等内容。通过这些文章的阅读和学习,读者可以了解到在ROS机器人学习中的一些实用知识和技术,并且可以了解到如何应用到自己的机器人项目中去。
第1篇介绍了ROS-Gazebo开源四足机器人仿真模型pig_dog2,通过对这个仿真模型的学习,读者可以了解到如何在ROS环境中进行机器人仿真建模,以及如何利用Gazebo仿真环境进行机器人的运动模拟。
第2篇介绍了ROS-Gazebo中pigot开源四足机器人项目的改进,对于想要深入了解四足机器人项目改进的读者来说,这篇文章提供了一个很好的学习材料。
第3篇介绍了平衡与舞蹈方面的内容,着重介绍了pigot四足机器人姿态控制仿真,通过学习这篇文章,读者可以了解到在机器人姿态控制方面的一些基本知识和技术。
第4篇主要介绍了IMU插件的使用与数据采集,以四足机器人pigot为例进行讲解,对于想要了解机器人传感器数据采集方面的读者来说,这篇文章是一个很好的学习资料。
第5篇至第7篇介绍了Cartographer ROS官方文档翻译学习的内容,包括了下载与安装、运行演示程序以及应用到自己的机器人的相关知识,这对于想要学习SLAM(Simultaneous Localization and Mapping)相关知识的读者来说是一个不错的学习材料。
第8篇介绍了四足机器人SLAM仿真,着重介绍了在ROS环境中进行SLAM仿真的一些方法和技术,对于想要学习SLAM仿真技术的读者来说,这篇文章值得一读。
第9篇和第10篇着重介绍了机械臂控制方面的内容,包括了基于Moveit!与Gazebo联合仿真方法以及基于python的API示例代码分析,这对于想要学习机械臂控制的读者来说是一个不错的学习资料。
第11篇综合了前面所学的内容,并介绍了pigot四足机器人控制仿真,可以说是一个对前面内容的一个综合涉及,对于想要进一步深入学习的读者来说,这篇文章是一个很好的学习资料。
通过整个资料的学习,读者可以了解到ROS机器人学习的一些实用知识和技术,并且可以根据自己的需求选择性的进行学习,对于想要在ROS机器人学习中进行深入学习的读者来说,这是一个很好的学习资源。希望通过这个资料的学习,读者可以在ROS机器人学习中有所收获,为自己的机器人项目的开发和应用打下坚实的基础。
添加如下代码以配置IMU,一般只需修改<bodyName>的值为想要连接IMU的连杆名称即可。
<!-- IMU plugin for 'body_link' -->
<gazebo reference="body_link">
true<gravity> </gravity>
<sensor name="imu_sensor" type="imu">
true<always_on> </always_on>
100<update_rate> </update_rate>
true<visualize> </visualize>
__default_topic__<topic> </topic>
<plugin filename="libgazebo_ros_imu_sensor.so" name="imu_plugin">
imu<topicName> </topicName>
body_link<bodyName> </bodyName>
100.0<updateRateHZ> </updateRateHZ>
0.0<gaussianNoise> </gaussianNoise>
0 0 0<xyzOffset> </xyzOffset>
0 0 0<rpyOffset> </rpyOffset>
imu_link<frameName> </frameName>
</plugin>
0 0 0 0 0 0<pose> </pose>
</sensor>
</gazebo>
对于大型工程,建议单独建立一个xacro文件以配置所有的插件(传感器、控制插件等),再在主
文件中引用。pigot项目中的插件配置文件为pigot.gazebo。
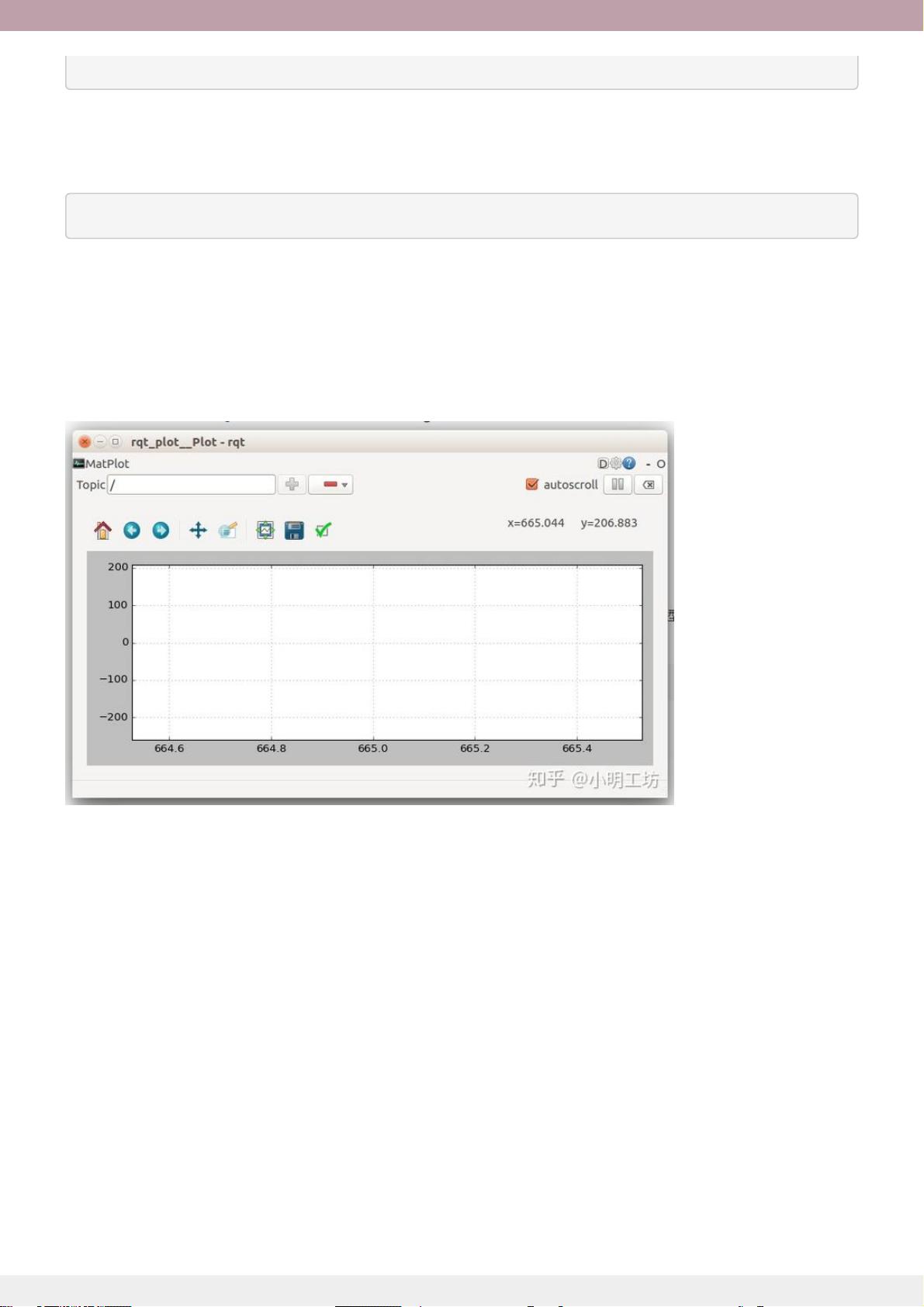
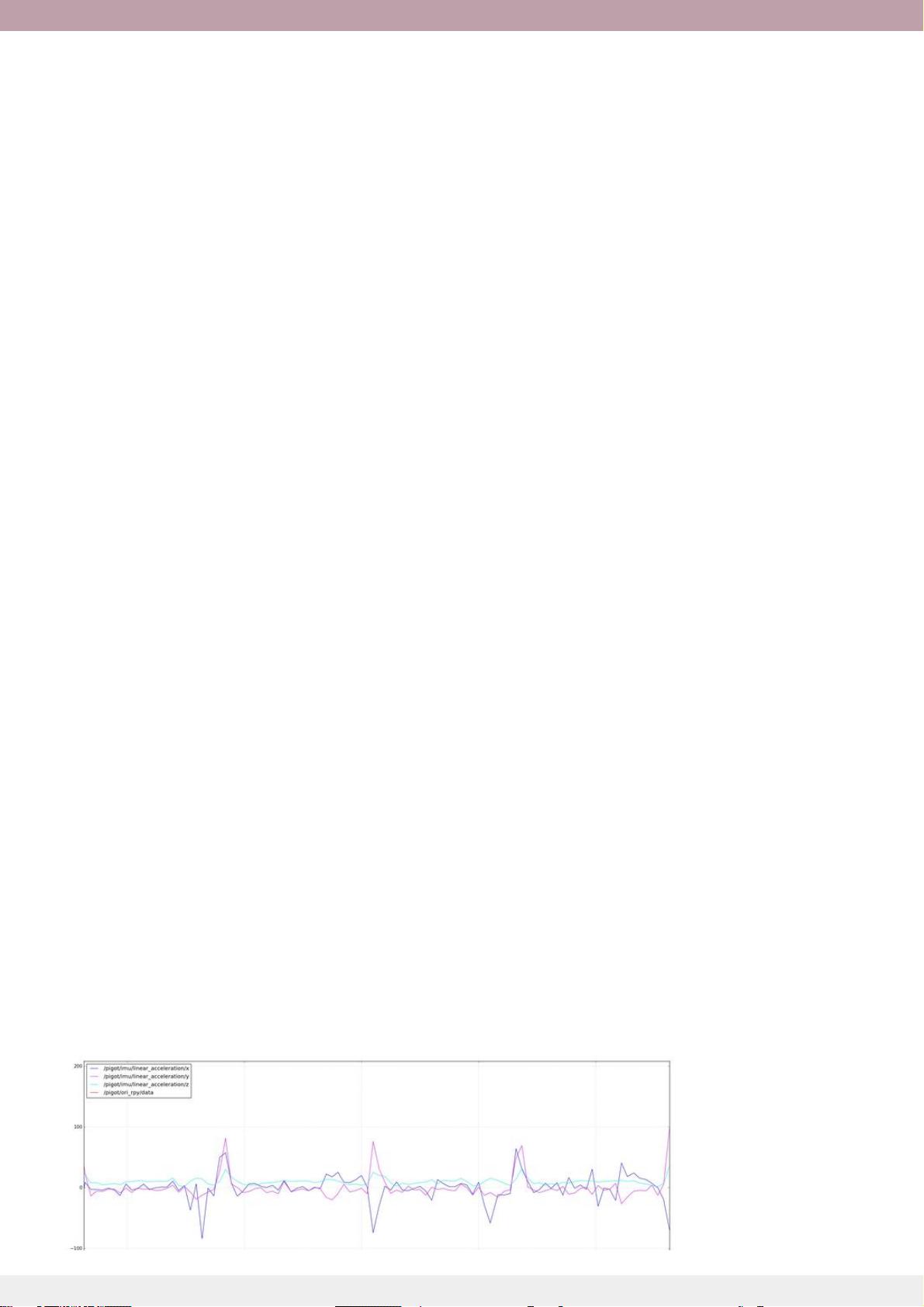
3.建立一个订阅者用以接收IMU数据
上述两步完成以后,运行仿真模型时,topic列表中就会出现一个imu话题,不停地有imu消息发送
到这个话题上。pigot项目中的话题为/pigot/imu,前缀/pigot来源于机器人运行在单独的命名空
间中,在pigot_world.launch中进行设置,设置方式见我的这篇文章。
订阅者代码如下,网络上很容易找到c++的代码,这里用python来写:
#!/usr/bin/env python
# license removed for brevity
import rospy
from sensor_msgs.msg import Imu
import math
def imu_cb(imu_data):
# Read the quaternion of the robot IMU
x = imu_data.orientation.x
y = imu_data.orientation.y
z = imu_data.orientation.z
w = imu_data.orientation.w
# Read the angular velocity of the robot IMU
w_x = imu_data.angular_velocity.x
w_y = imu_data.angular_velocity.y
w_z = imu_data.angular_velocity.z
第4篇 【ROS-Gazebo】IMU插件使用与数据采集——以四足机器人pigot为例
第 14 页 /共
179 页

剩余180页未读,继续阅读
2022-09-20 上传
2021-09-30 上传
2021-09-29 上传
2020-06-24 上传
2021-09-30 上传
2021-10-04 上传
2021-10-03 上传

北极象
- 粉丝: 1w+
- 资源: 401
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
