Elmo驱动器专家模式配置指南:电流环与换向设置
需积分: 0 148 浏览量
更新于2024-08-04
收藏 2.29MB DOCX 举报
"Elmo驱动器的专家模式配置教程"
Elmo驱动器是高级运动控制领域的关键设备,其Expert模式提供了全面的定制化选项,以适应各种精密应用的需求。在配置过程中,用户需要深入理解各个配置步骤,确保驱动器能够安全、高效地运行。
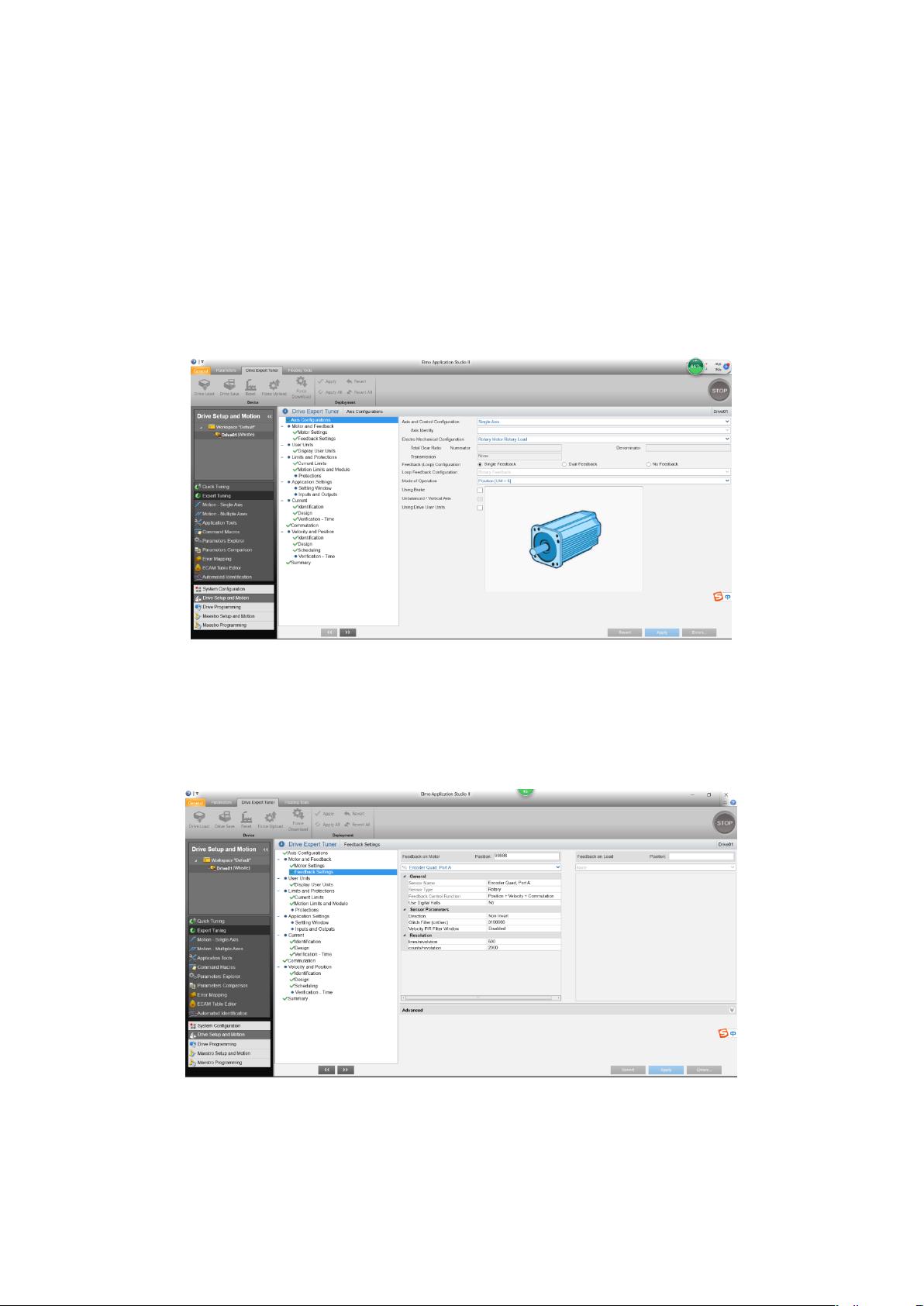
首先,配置开始于"AxisConfigurations",在此环节中,你需要指定电机的类型和工作模式。如果电机只使用单一编码器反馈,那么选择"SingleFeedback"是最常见的选择。"ModeofOperation"则允许你选择驱动器的工作模式,如位置模式、速度模式或电流模式,这取决于你的应用需求。
接下来,进入"MotorandFeedback"设置,这里需设定电机参数和编码器参数。编码器端口号的选择应与实际物理连接对应,而"Resolution"处的设置应根据编码器的线数来确定,系统会据此自动生成计数器的数值。
在"UserUnits"中,你可以设定位置和速度的计量单位。虽然默认单位通常是count,但根据需要,也可以改为弧度(rad)或角度(degree)。不过,一般情况下,不建议修改这个设置。
"LimitsandProtections"是至关重要的安全设置,用于设置电流、位置等保护参数,防止驱动器过载或其他潜在危险。在这里,你可以设定驱动器内部的安全限制,以确保设备在运行时的安全性。如果不熟悉具体设置,通常可以保持默认,但强烈建议根据实际情况进行适当调整。
在"ApplicationSetting"部分,"SettingWindow"的动态响应参数通常不需要改动,除非对系统的响应特性有特殊需求。"InputsandOutputs"则涉及驱动器的输入输出配置,可以根据实际系统的接口需求进行设置。
电流环是电机控制的关键部分。在"Current"配置中,"6.1 Identification"阶段是进行电流环参数辨识,通过设置CurrentLevel并运行Identify,可以估计电阻和电感参数。"6.2 Design"环节允许你设计电流环控制器,设置所需的带宽和相位,点击"Design"后,系统将自动生成Kp和Ki参数。然后,在"6.3 Verification-Time"中,你可以通过调整这些参数并观察控制响应来验证设计的有效性。"6.4 Commutation"涉及到换向定义,通过RunCommutation来确定电机的正反转方向。
速度环和位置环的设置在"7.x Identification"和"7.2 Design"中完成。"7.1 Identification"阶段辨识速度环和位置环的参数,可能需要调整CurrentLevel以获得准确的识别结果。而在"7.2 Design"中,系统会自动设计速度环的Kp、Ki以及位置环的Kp,这些参数对系统的精度和稳定性至关重要。
Elmo驱动器的Expert模式配置是一个涉及多方面参数调整的过程,需要对电机控制理论和驱动器工作原理有深入了解。每个步骤都对驱动器的性能有着直接影响,因此,正确配置是确保系统运行顺畅和安全的关键。
Elmo 驱动器的连接以及快速模式配置见“配置图解”文件夹。
另外,Expert Tuning 配置过程如下:
一、Axis Configurations,设置电机的类型以及工作模式。
一般为单一编码器反馈,选择“Single Feedback”即可;
Mode of Operation,可以选择位置模式/速度模式/电流模式。
二、Motor and Feedback,设定电机参数以及编码器参数。
根据编码器连接位置选择相应的端口号;
在 Resolution 处设置编码器线数,自动生成计数个数。
三、User Units,设置位置与速度的计量单位。
默认为 count,可以更改为 rad 或者 degree。一般不修改。
下载后可阅读完整内容,剩余3页未读,立即下载
2022-08-08 上传
274 浏览量
2022-09-20 上传
2020-12-07 上传
2022-09-19 上传
2018-03-10 上传
点击了解资源详情

小米智能生活
- 粉丝: 46
- 资源: 300
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
