单张RGB图像重建3D房间布局:LayoutNet方法
下载需积分: 13 | PDF格式 | 2.55MB |
更新于2024-09-09
| 200 浏览量 | 举报
LayoutNet是一种先进的计算机视觉算法,专注于从单张RGB图像中重建三维房间布局。这项研究的创新之处在于其能够处理各种类型的室内空间布局,包括全景图、透视图、立方体布局以及更复杂的“L”形房间等。与现有方法不同,LayoutNet直接在全景图像上进行操作,而非将其分解为多个透视视角,这使得它在处理单一输入时更具效率。
该算法的核心网络结构类似于RoomNet,但通过引入关键改进实现了更高的性能。首先,LayoutNet利用图像中的消失点进行对齐,这有助于精确捕捉到空间结构的几何关系。其次,它预测了多个布局元素,包括角落、边界、尺寸和位置,这些信息对于构建准确的三维模型至关重要。此外,通过采用约束的曼哈顿布局模型,LayoutNet能够在预测后进行优化,确保布局的合理性。
在速度和准确性方面,LayoutNet在处理全景图像时表现出色,与其他同类方法相比具有竞争力。对于透视图像,其准确度更是名列前茅,这意味着它不仅适用于常见的规则形状(如立方体),还能处理更普遍的曼哈顿布局,这在实际应用中具有广泛的优势。这种能力对于诸如室内设计、虚拟现实和增强现实等领域,以及房地产评估和智能家居设备的定位等方面具有重要意义。
LayoutNet代表了一种前沿的3D计算机视觉技术,它将单一图像作为输入,通过精巧的设计和多元素预测,实现了对复杂房间布局的高效、准确重建,为相关领域的研究和实践提供了强大的工具。随着技术的进一步发展,LayoutNet有望推动更多基于视觉的室内环境理解和交互应用的发展。
LayoutNet: Reconstructing the 3D Room Layout from a Single RGB Image
Chuhang Zou
†
Alex Colburn
‡
Qi Shan
‡
Derek Hoiem
†
†
University of Illinois at Urbana-Champaign
{czou4, dhoiem}@illinois.edu
‡
Zillow Group
{alexco, qis}@zillow.com
Abstract
We propose an algorithm to predict room layout from a
single image that generalizes across panoramas and per-
spective images, cuboid layouts and more general layouts
(e.g. “L”-shape room). Our method operates directly on the
panoramic image, rather than decomposing into perspec-
tive images as do recent works. Our network architecture is
similar to that of RoomNet [
15], but we show improvements
due to aligning the image based on vanishing points, pre-
dicting multiple layout elements (corners, boundaries, size
and translation), and fitting a constrained Manhattan lay-
out to the resulting predictions. Our method compares well
in speed and accuracy to other existing work on panora-
mas, achieves among the best accuracy for perspective im-
ages, and can handle both cuboid-shaped and more general
Manhattan layouts.
1. Introduction
Estimating the 3D layout of a room from one image is an
important goal, with applications such as robotics and vir-
tual/augmented reality. The room layout specifies the posi-
tions, orientations, and heights of the walls, relative to the
camera center. The layout can be represented as a set of
projected corner positions or boundaries, or as a 3D mesh.
Existing works apply to special cases of the problem, such
as predicting cuboid-shaped layouts from perspective im-
ages or from panoramic images.
We present LayoutNet, a deep convolution neural net-
work (CNN) that estimates the 3D layout of an indoor
scene from a single perspective or panoramic image (Fig-
ure.
1). Our method compares well in speed and accu-
racy on panoramas and is among the best on perspec-
tive images. Our method also generalizes to non-cuboid
Manhattan layouts, such as “L”-shaped rooms. Code is
available at:
https://github.com/zouchuhang/
LayoutNet
.
Our LayoutNet approach operates in three steps ( Fig-
ure.
2). First, our system analyzes the vanishing points
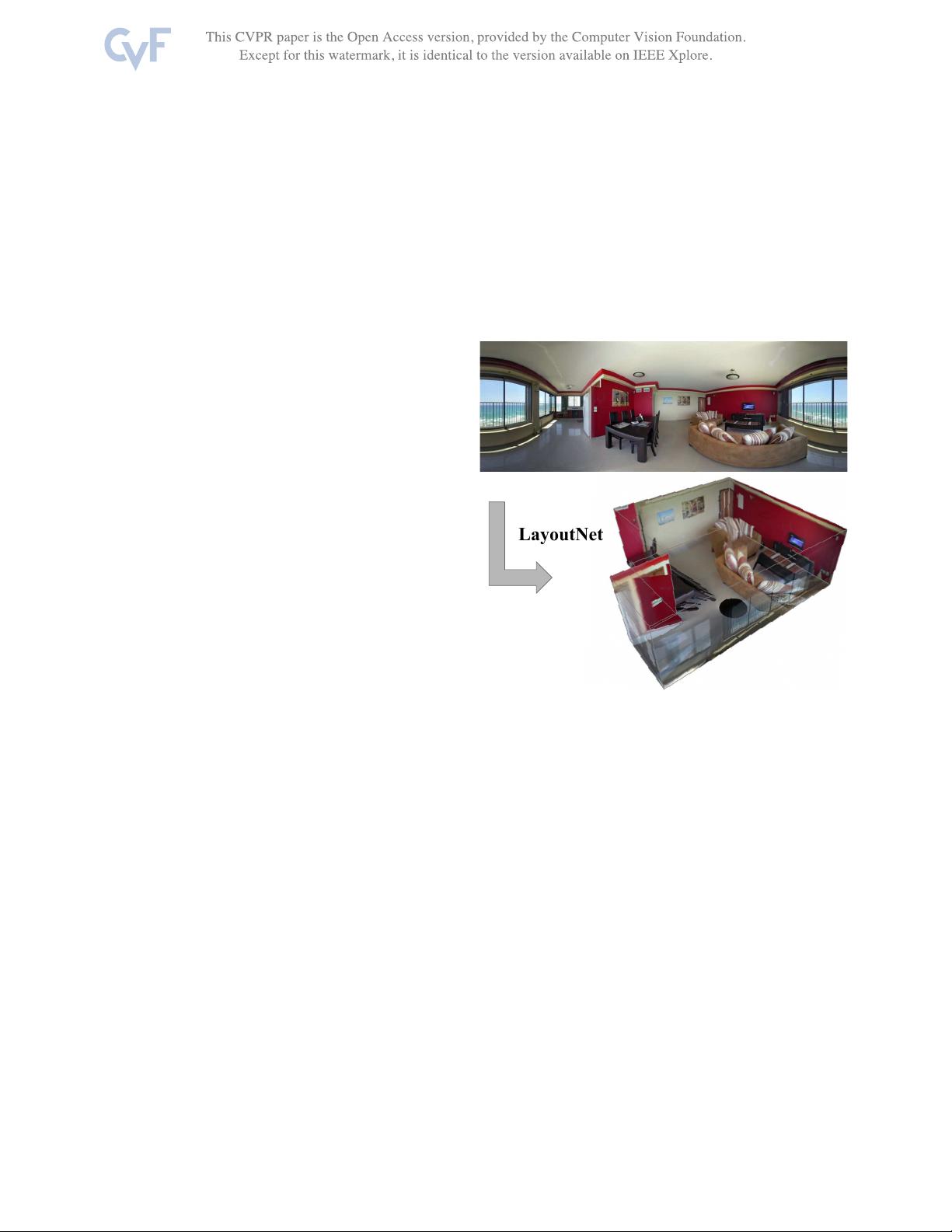
LayoutNet
Figure 1. Illustration. Our LayoutNet predicts a non-cuboid room
layout from a single panorama under equirectangular projection.
and aligns the image to be level with the floor (Sec. 3.1).
This alignment ensures that wall-wall boundaries are ver-
tical lines and substantially reduces error according to our
experiments. In the second step, corner (layout junctions)
and boundary probability maps are predicted directly on the
image using a CNN with an encoder-decoder structure and
skip connections (Sec.
3.2). Corners and boundaries each
provide a complete representation of room layout. We find
that jointly predicting them in a single network leads to bet-
ter estimation. Finally, the 3D layout parameters are opti-
mized to fit the predicted corners and boundaries (Sec.
3.4).
The final 3D layout loss from our optimization process is
difficult to back-propagate through the network, but direct
regression of the 3D parameters during training serves as an
effective substitute, encouraging predictions that maximize
accuracy of the end result.
Our contributions are:
• We propose a more general RGB image to layout al-
gorithm that is suitable for perspective and panoramic
2051
下载后可阅读完整内容,剩余8页未读,立即下载





wangcheng510
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易二维码签到系统:会议活动签到解决方案
- Ceres库与SDK集成指南:C++环境配置及测试程序
- 深入理解Servlet与JSP技术应用与源码分析
- 初学者指南:掌握VC摄像头抓图源代码实现
- Java实现头像剪裁与上传的camera.swf组件
- FileTime 2013汉化版:单文件修改文件时间的利器
- 波斯语话语项目:实现discourse-persian配置指南
- MP4视频文件数据恢复工具介绍
- 微信与支付宝支付功能封装工具类介绍
- 深入浅出HOOK编程技术与应用
- Jettison 1.0.1源码与Jar包免费下载
- JavaCSV.jar: 解析CSV文档的Java必备工具
- Django音乐网站项目开发指南
- 功能全面的FTP客户端软件FlashFXP_3.6.0.1240_SC发布
- 利用卷积神经网络在Torch 7中实现声学事件检测研究
- 精选网站设计公司官网模板推荐
