Simulink动态系统建模与仿真教程
版权申诉
112 浏览量
更新于2024-07-01
1
收藏 2.26MB PDF 举报
"Simulink建模与仿真.pdf"
Simulink是MATLAB环境下的一个强大工具,用于构建、模拟和分析多域动态系统。它的核心优势在于其图形化界面,使得用户无需记住复杂的命令行语法,只需通过鼠标操作就能创建模型和进行仿真。在Simulink中,系统建模主要涉及模型的选择、连接以及参数设定,这使得建模过程直观且高效。
动态系统在Simulink中的建模与仿真通常涉及以下几个步骤:
1. 理解系统模型:首先,需要了解要建模的动态系统的结构和工作原理,包括各个组成部分及其相互关系。例如,对于控制系统,这可能包括控制器、传感器、执行机构等。
2. 选择Simulink模块:Simulink提供了丰富的模块库,覆盖了各种工程领域的模型,如信号处理、控制理论、数学函数等。用户可以根据系统的需求从这些模块中选取合适的组件。
3. 绘制系统框图:利用Simulink的工作区,将选好的模块拖放到工作面板上,并用线连接它们以形成系统框图。这一步与传统的系统分析中绘制的框图类似,但更加直观和动态。
4. 设置参数:每个模块都有自己的参数设置,用户可以通过双击模块或者在属性窗口中调整这些参数以适应具体系统。这包括常数值、传递函数、微分方程等。
5. 定义输入和输出:系统的行为通常由输入信号触发,输出则反映系统响应。Simulink提供多种信号源(如Step、Sine、Random等)来模拟输入,同时通过端口连接定义输出。
6. 仿真设置:设置仿真时间范围、步长、初始条件等,以便于观察系统在不同条件下的行为。
7. 运行仿真:点击“Run”按钮开始仿真,Simulink会根据模型和设置生成仿真结果,这些结果通常以图表形式展示,便于分析和理解。
8. 结果分析:通过对仿真结果的分析,可以评估系统性能,如稳定性、响应时间、超调量等。如果不符合预期,可以修改模型参数或结构并重新仿真。
在例子7-1中,讨论了直流电机双闭环调速系统的Simulink建模。这个系统包含电流环和电压环,每个环都由PI调节器构成。首先,通过断开转速环来整定电流调节器ACR,然后在保持电流环的同时整定转速环ASR。在这个过程中,Simulink模型使用了空白子系统来表示具体的调节器,这样可以简化高层模型,并允许在后续阶段对这些子系统进行详细设计。
Simulink提供了一种强大的工具,使得工程师和研究人员能够快速、直观地对复杂动态系统进行建模和仿真,从而更好地理解和优化系统的性能。通过不断学习和实践,用户可以掌握Simulink的高级使用技巧,应对更为复杂的工程问题。
249
第
7
章
动态系统
Simulink
建模与仿真
再
利用
每
个
微
分方程
之
间的变量
联
系,就建立
起
整个系统的
Simulink
仿真模型。不
管
系统的
数学模型简单与
否
,建立
Simulink
仿真模型的方法
都
是这
样
。下面以建立
交
流电机
Simulink
仿真模型为例,来进一步说明利用
微
分方程建立系统
Simulink
仿真模型的方法。
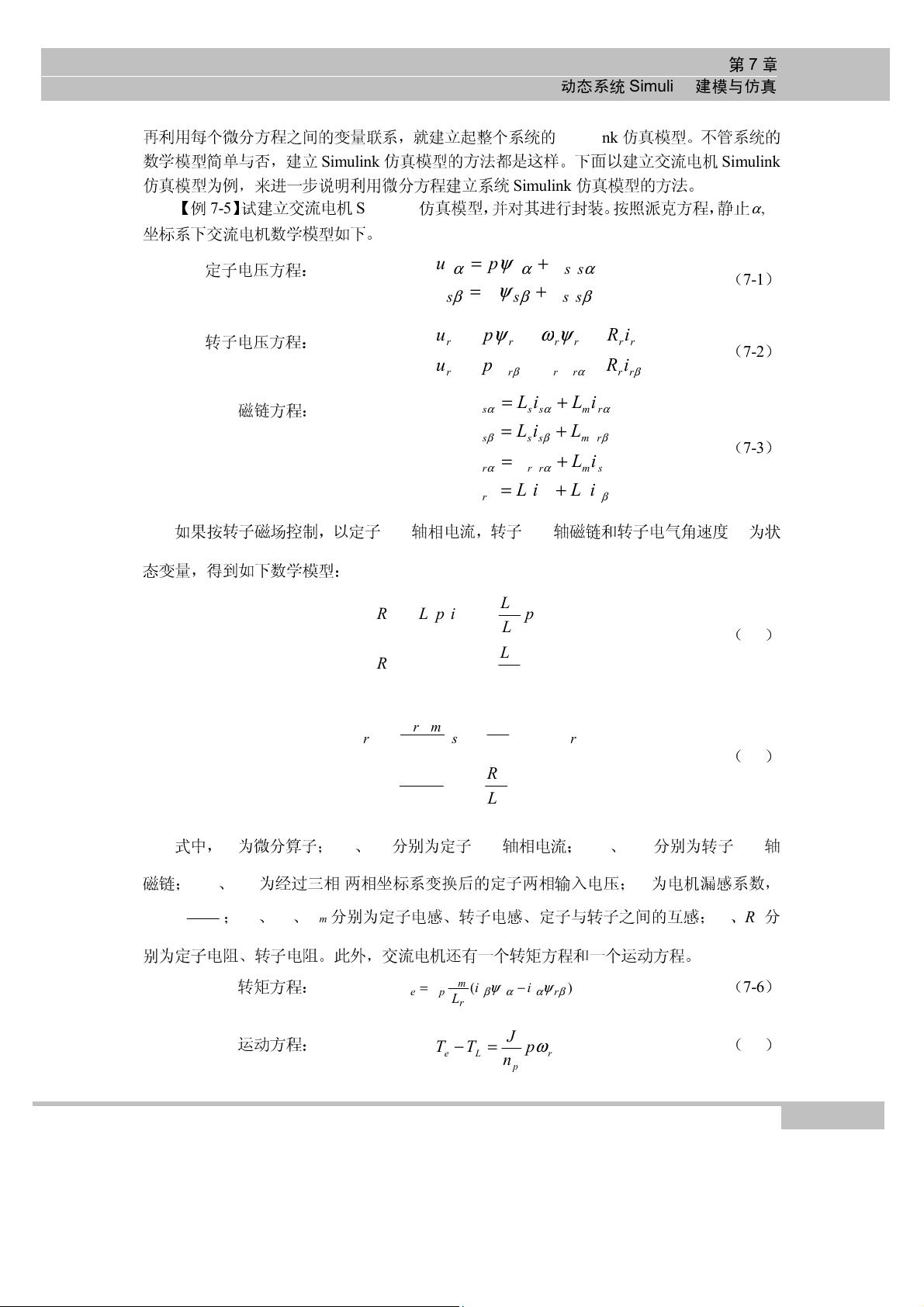
【例
7-5
】试建立
交
流电机
Simulink
仿真模型,并对其进行封装。
按照派克
方程,
静止
βα
,
坐
标系下
交
流电机数学模型如下。
定子电压方程
:
βββ
ααα
ψ
ψ
ssss
ssss
iRpu
iRpu
+=
+
=
(
7-1
)
转子电压方程
:
βαββ
αβαα
ψωψ
ψ
ω
ψ
rrrrrr
rrrrrr
iRpu
iRpu
+−=
+
+
=
(
7-2
)
磁链
方程
:
βββ
ααα
βββ
ααα
ψ
ψ
ψ
ψ
smrrr
smrrr
rmsss
rmsss
iLiL
iLiL
iLiL
iLiL
+=
+=
+=
+
=
(
7-3
)
如果
按
转子
磁场
控制,以定子
βα
,
轴
相电流,转子
βα
,
轴磁链
和转子电
气角
速度
r
ω
为
状
态变量,得到如下数学模型
:
βββ
ααα
ψσ
ψσ
sr
r
m
sss
sr
r
m
sss
up
L
L
ipLR
up
L
L
ipLR
+−=+
+−=+
)(
)(
(
7-4
)
αβββ
βααα
ψωψψ
ψωψψ
rrr
r
r
s
r
mr
r
rrr
r
r
s
r
mr
r
L
R
i
L
LR
p
L
R
i
L
LR
p
+−=
−−=
(
7-5
)
式中,
p
为
微
分
算
子
;
α
s
i
、
β
s
i
分
别
为定子
βα
,
轴
相电流
;
α
ψ
r
、
β
ψ
r
分
别
为转子
βα
,
轴
磁链;
α
s
u
、
β
s
u
为经过
三
相
/
两相
坐
标系变
换
后的定子两相输入电压
;
σ
为电机
漏感
系数,
rs
m
LL
L
2
1
−=
σ
;
s
L
、
r
L
、
m
L
分
别
为定子电
感
、转子电
感
、定子与转子
之
间的
互感;
R
s
、
R
r
分
别
为定子电
阻
、转子电
阻
。此外,
交
流电机还有一个转
矩
方程和一个运动方程。
转
矩
方程
:
)(
βααβ
ψψ
rsrs
r
m
pe
ii
L
L
nT −=
(
7-6
)
运动方程
:
r
p
Le
p
n
J
TT
ω
=−
(
7-7
)
剩余49页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2019-05-30 上传
2019-08-11 上传
2021-07-10 上传
2021-07-03 上传
2021-10-31 上传
2021-06-28 上传

智慧安全方案
- 粉丝: 3837
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- nostalgebraist-autoresponder:tumblr bot nostalgebraist-autoresponder的代码
- Multi depth pointer based Triangle List:非常快速且可动态扩展的数据结构。-开源
- Android参考源码-调用Android中的软键盘.zip
- ynapshot-CPETT,c语言测试源码是否正确,c语言
- baseballmatching2
- grunt-boilerplate:Grunt、LESS 和 include-replace 满足您所有的 webapp 开发需求
- ibc2k1.github.io
- xryuseix.github.io
- Android应用源码之悬浮窗 监视内容.zip项目安卓应用源码下载
- zbzh,c语言二十一点游戏源码简单,c语言程序
- Vier Hack-crx插件
- BowlingScoreCalculator
- Kinematics-Web-Calculator
- OFDM 频谱:带 GI 的 OFDM 频谱。-matlab开发
- ChatApplication
- No roses-crx插件
