简易PID算法解析与实现
需积分: 10 152 浏览量
更新于2024-07-21
2
收藏 403KB PDF 举报
"这篇文档是关于PID算法的简易理解和实现,主要面向应用层面,通过C代码展示PID控制器的实现,并提供了三个应用场景示例:电机驱动齿轮组、精密定位系统和恒温系统,来帮助读者更好地理解PID算法在不同场景中的应用效果。"
PID算法是一种广泛应用于控制系统中的算法,其名称由比例(Proportional)、积分(Integral)和微分(Derivative)三个部分组成。该算法的核心思想是通过结合这三个部分的输出,以调整系统的控制响应,达到期望的性能。
1. 比例项(P):比例项直接反映了当前误差的大小,它的输出与误差成正比。当误差较大时,P项的输出也较大,从而快速调整控制输出。然而,仅依赖P项的控制系统可能会存在稳态误差,即系统无法完全消除误差。
2. 积分项(I):积分项的作用在于消除稳态误差,它随着时间积累误差的总和。当误差持续存在时,I项的输出会逐渐增大,直到误差被完全抵消。但过度的积分可能导致系统振荡。
3. 微分项(D):微分项预测未来误差的变化趋势,它基于误差的变化率进行调整。通过提前调整控制输出,D项有助于减少系统的超调和振荡,提高系统的稳定性。
在实际应用中,PID控制器的参数(P、I、D增益)需要通过试错法或自动整定方法进行调整,以适应具体系统的动态特性。文章中提到的C代码实现,就是将PID算法转化为可执行的控制逻辑,适用于嵌入式系统。
文章通过以下三个实例进一步解释PID的应用:
1. 电机驱动齿轮组:这个例子展示了PID如何用于中等精度的位置控制,如打印机驱动器或汽车巡航控制。电机的位置由电位器或其他传感器反馈,PID算法通过调整电机的转速来使实际位置接近目标位置。
2. 精密定位系统:在高精度需求的场合,如机器人的精确移动或光学定位,PID算法需要更精细地调节,以实现微米级的定位精度。
3. 恒温系统:PID在温度控制中的应用很常见,通过调整加热或冷却设备的工作强度,使系统温度保持在设定值附近。
这些实例有助于读者理解PID在不同环境下的工作原理和效果,即使没有深入的控制理论背景,也能通过实践理解并应用PID算法。
这一机构中的磁力与台板移动的力独立开来,好处就是使得台板不受外力的
影响,缺点就是造成系统非常“滑”,控制起来有难度。另外,电子必须的一个
好的电流输出形放大器和非接触式位置传感器做起来也有挑战。可以预计,如果
是你做了这样一个项目(或者是接了个短期项目),你就是这个相当优秀的团队
中一员。
这个系统的运动方程非常简单,台板上的力只与驱动命令成比例关系,所以
系统的加速度与驱动输出也是成比例关系。系统自身的阶跃响应是一条抛物线,
见图 5。由于有惯性,台板动起来就会一直动,这会导致系统控制更加困难,这
个我会在后面讲到。
图 5:精密驱动器位置 vs. 时间
温度控制
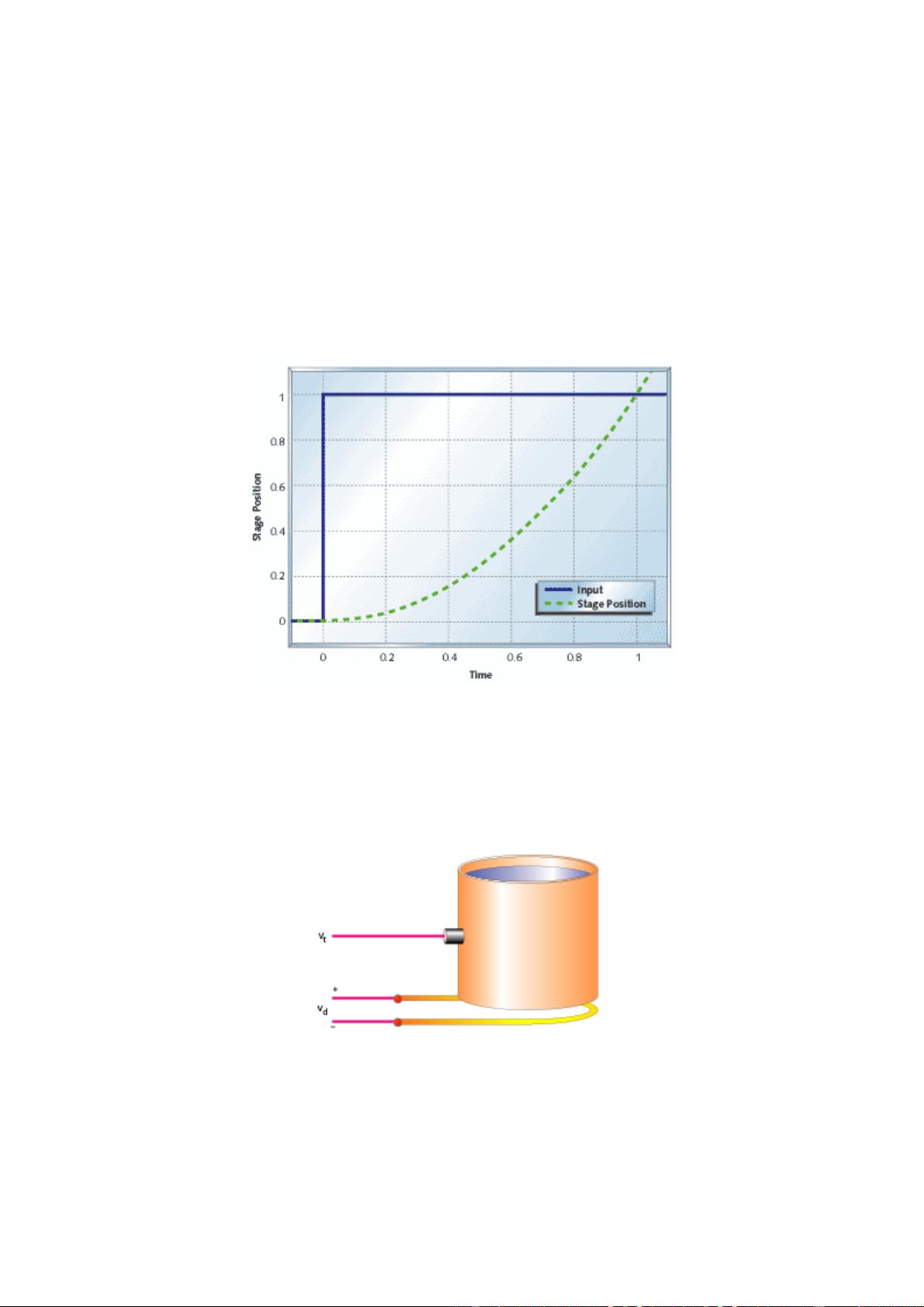
第三个例子是一个加热器,图 6 显示了系统简单示意图。电加热器加热一个
大容器,通过温度传感装置来获得温度值。
图 6:加热器
加热系统往往具有非常复杂的响应,我准备忽略一些细节,给出一个非常近
似的模型,除非你对性能要求非常严格,那么一个精确的模型没什么必要。
图 7 显示了在 Vd(一定电压值?)下该系统的阶跃响应的变化。时间常量
剩余15页未读,继续阅读
点击了解资源详情
105 浏览量
139 浏览量
2024-04-15 上传
114 浏览量
2022-09-24 上传
2024-04-15 上传
2017-11-05 上传
163 浏览量

Tonyhxy
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Saucectl-Espresso快速设置与运行示例教程
- QQKEY获取与发信技巧:告别平凡的网络互动
- Hetman NTFS Recovery v2.7:中文版NTFS数据恢复专家
- LeetCode问题分类总结与求解策略
- gdev工具:TypeScript驱动的开发利器
- Python3.x兼容的HTMLTestRunner自动化测试工具
- 遗传算法在工业优化问题中的应用研究
- uploadHelper:.NET平台下的高效文件上传工具
- SwiftUI自定义五彩纸屑动画的结帐页面实现
- MATLAB与AForge.NET实现神经网络分类源代码
- 岩土计算软件V6.5安装与快速使用教程
- TizenScheduler项目:JavaScript驱动的调度器开发
- Android性能测试工具:DBAndroidBenchmark入门指南
- 掌握SPI协议:Verilog源码及完整测试套件
- Java解析与ShapeExplorer结合使用分析shp文件
- iPhone端小红伞工具功能介绍与应用
