机器视觉对位引导技术详解
"本教程主要涉及机器视觉对位引导技术,包括使用Cognex、Halcon、OpenCV等算法库的实践应用。讲解了不同场景下的机器人坐标系单相机引导、旋转中心法、工件坐标系法以及多相机引导装配等方法。教程还特别强调了非线性标定的重要性,并提供了实物标定与尖锥扎点两种标定方式的细节,以确保高精度的定位和对位贴合。"
在机器视觉对位引导领域,理解并掌握各种引导技术至关重要。首先,单相机引导涉及到StdxStdy的方法,适用于取料前调整机器人姿态的情况。相机可以固定安装,也可以装在机器人上,通常是在拍照后进行取料操作。旋转中心法则适用于相机固定安装的场景,先取料再拍照,尤其当放料位置存在角度或旋转中心远离相机视野中心时,需要考虑这些因素以精确对位。
工件坐标系法是另一种常见的对位策略,它允许根据工件自身的坐标系来引导机器人进行取放动作。在多相机多工位引导装配中,单相机负责拍摄单个物料,而执行机构(如机器人或自建的X/Y/T轴平台)则依据相机提供的信息进行装配。
双相机或多相机引导对位贴合则更为复杂,通常涉及运动控制平台,通过多角度拍摄和分析来确保对位精度。这种情况下,相机和执行机构可以是固定的,也可以根据需要移动,确保物料在抓取和放置时的精确位置。
非线性标定是确保机器视觉精度的关键步骤,尤其是在相机FOV大于20mm或者系统要求亚毫米级精度时。标定过程包括实物标定和尖锥扎点两种方法,前者通常能提供更高的精度。标定的目的是建立相机2D坐标与机器人2D或Home2D坐标之间的关系,确保坐标轴平行且能进行位置平移计算。
实物标定通常涉及机器人在相机视野内取放产品多次,而尖锥扎点标定则依赖于精确的尖锥对位,但这种方法可能存在较大的误差。在实施标定时,需要注意选择合适的位置点,保证拍照高度的一致性,并确保在标定过程中产品的相对位置稳定。
机器视觉对位引导是机器人自动化中的核心技术之一,通过精准的标定和灵活的引导策略,可以实现高效、精确的自动化生产。本教程通过详细阐述各种方法和技术,为学习者提供了深入理解和实践机器视觉对位引导的坚实基础。

实际应用时有两种情况:
场景一:相机固定安装,先拍照,机器人根据引导信息
调整姿态,这样取到的物料位置一致,再去走定点放料;
用 StdxStdy 的方法 工件坐标系法 旋转中心法
场景二:相机从下往上拍照,机器人走固定位置取料,
取料后到相机固定位置进行拍照,进行姿态调整和补偿后放
料;
用旋转中心法 工件坐标系法
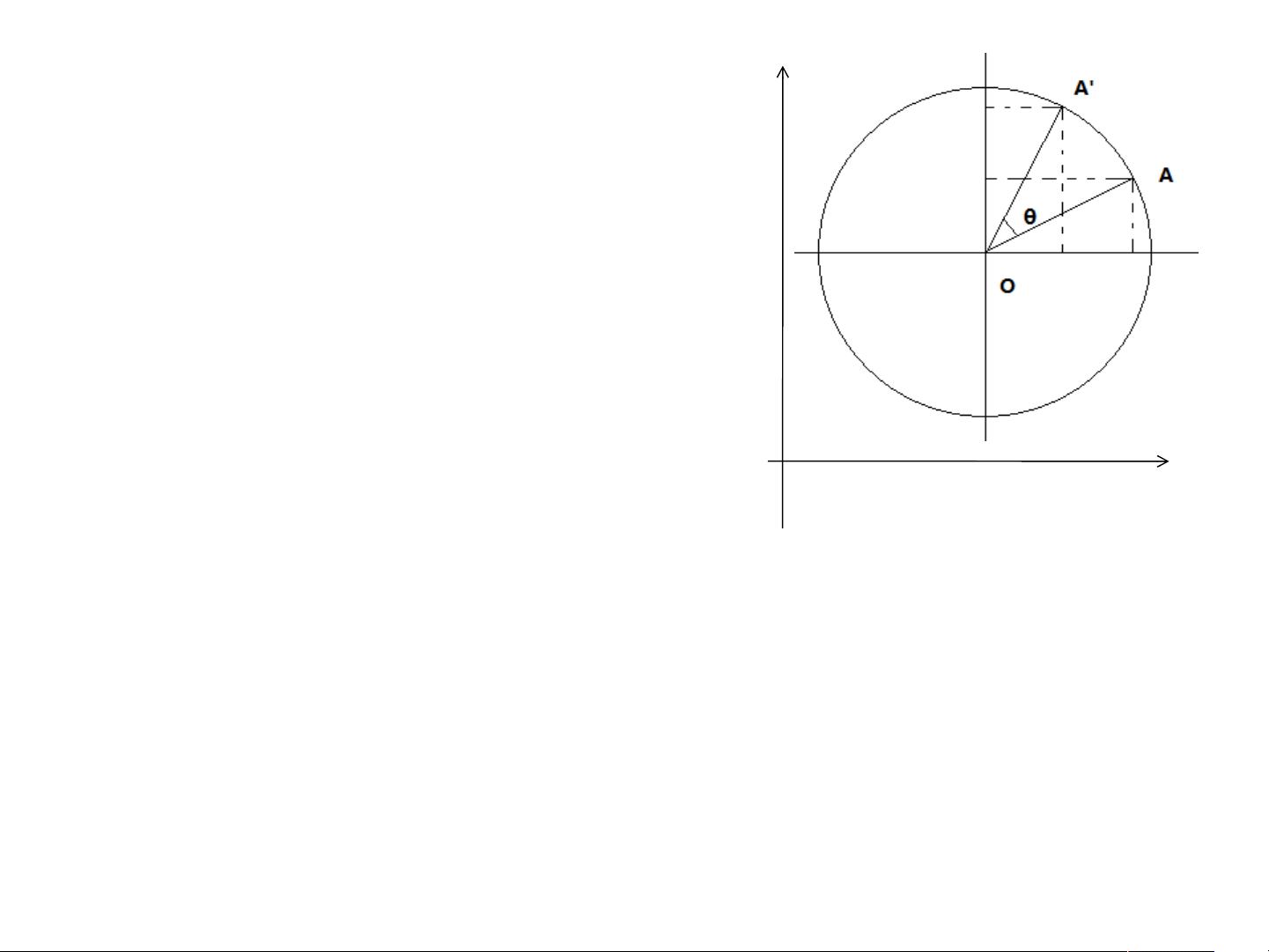
1.3 步骤三 找旋转中心,用于位置计算
剩余36页未读,继续阅读
3741 浏览量
135 浏览量
203 浏览量
2024-11-10 上传
2025-03-11 上传
159 浏览量
426 浏览量

普通网友
- 粉丝: 51
 我的内容管理
展开
我的内容管理
展开








最新资源
- 4*4键盘单片机扫描技术详解
- C++编写winTC下的简单猜数游戏界面
- VC++6.0聊天室程序开发实战:源码解析与应用
- 基于Python实现的Hill密码加密解密工具
- 网络层实验二:路由路径分析与A/B/C类地址分类
- JSP技术实现二维码生成与解码指南
- MvBox 5.0正式发布:集多功能于一体的卡拉OK播放器
- 解决MyEclipse安装Activiti5.18插件打开BPMN文件报错问题
- C#实现.NET Remoting双向通信技术详解
- 深入探索UNIX版本6源码——莱昂氏经典分析
- pager-taglib-2.0 使用教程:轻松实现页面分页
- form-from-functions:探索虚拟编程环境的新境界
- 高效实用挂机锁屏软件介绍
- 深入理解ASP_NET_MVC: 一个实用例子的分享
- C#实现WEB&WINFORM下的斑马标签打印教程
- LEACH-C算法优化与网络能量节省研究











