程序驱动的分支预测技术
需积分: 9 174 浏览量
更新于2024-08-01
收藏 151KB PDF 举报
"Branch Prediction For Free"
这篇论文探讨了如何在编译器中实现分支预测以提高程序性能,特别是关注于无需使用耗时的“编译-分析-再编译”周期的预测方法。传统的基于配置的分支预测器依赖于对程序运行的详细统计信息,这需要一个繁琐的过程。然而,作者提出了一种程序基础的分支预测器,它能够对C和Fortran编写的大量多样化的程序提供有效的预测。
论文的核心在于利用自然循环分析来预测控制循环迭代的分支,并设计了一些简单的启发式策略来预测非循环分支,这些分支在许多程序的动态分支计数中占据主导地位。尽管这些启发式策略的分析复杂度低,但它们在覆盖率和错误率方面表现良好。作者指出,虽然程序基础的预测可能不如基于配置的预测准确,但其效果已经足够实用。
此外,论文还讨论了如何通过利用编译器可获取的额外类型和语义信息来进一步改进这些启发式策略。这表明,如果能更深入地理解和利用程序的结构和上下文,分支预测的精度和效率可以得到提升。
论文的作者是Thomas Ball和James R. Larus,他们都是计算机科学领域的专家,分别来自威斯康星大学麦迪逊分校的计算机科学系。这篇论文发表于1993年的ACM SIGPLAN '93 Conference on Programming Language Design and Implementation,强调了编译器在优化代码执行中的重要作用,特别是在处理分支决策时,这直接影响到现代处理器的流水线性能。
“Branch Prediction For Free”这篇论文揭示了如何在不增加额外开销的情况下,通过编译器内部的简单策略实现分支预测,从而提高程序执行速度,这对于理解和改进编译器优化技术具有重要意义。尽管它在准确性上可能无法完全替代基于配置的预测,但这种方法提供了一个实用且高效的替代方案,特别是在考虑到实际开发效率和资源限制时。
heuristics for non-loop branches and measures their effec-
tiveness in isolation. Section 5 considers combining these
simple heuristics into a complete heuristic and contains the
results for this heuristic. Section 6 presents results on how
our heuristic performs at finding sequences of instructions
without a mispredicted branch. We compare profile-based
methods for measuring this quantity with trace-based
methods and show why trace-based methods are preferable.
Section 7 examines the performance of our heuristic on dif-
ferent datasets. Section 8 reviews related work and Section
9 concludes the paper.
2. BACKGROUND
We restrict our heuristics to predicting two-way conditional
branches with fixed targets. Throughout the paper, the
word branch refers to such branches. We do not consider
branches whose target is dynamically determined (by
lookup in a jump table, for example). Associated with each
conditional branch instruction is its target successor—the
instruction to which control passes if the branch condition
evaluates to true—and its fall-thru successor—the instruc-
tion to which control passes if the branch condition evalu-
ates to false.
We used our profiling and tracing tool QPT [2] both as a
platform for studying branch behavior and for making
branch predictions. QPT takes as input a MIPS executable
file and produces an instrumented program that generates an
edge profile (i.e., for each branch, a count of how many
times control passes to the target and fall-thru successor)
when run. QPT can also instrument a program to produce
an instruction and address trace. Since QPT operates on an
executable file, all program procedures are analyzed. The
numbers in this paper include DEC Ultrix 4.2 library pro-
cedures as well as application procedures.
In order to instrument an executable file, QPT builds a
control flow graph for each procedure in the executable file.
Each vertex in the control flow graph represents a basic
block of instructions. A basic block ending with a condi-
tional branch corresponds to a vertex in the control flow
graph with two outgoing edges. The root vertex of the con-
trol flow graph is the entry point of the procedure. A basic
block containing a return (procedure exit) has no successors
in the control flow graph.
Some of our heuristics make use of the control flow
graph’s domination and postdomination relations [1]. A
vertex v dominates w if every path from the entry point of
the procedure to w includes v. A vertex w postdominates v
if every path from v to any exit vertex includes w. If the
successor of a branch postdominates the branch, then no
matter which direction the branch takes, the successor even-
tually executes.
We analyzed the programs in the SPEC89 benchmark
suite [4], along with a number of other programs. These
benchmarks (23 of them) are listed in Table 1, along with a
iiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiii
Size
Program Description Lng. (1Kb)
iiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiii
congress Interp. for Prolog-like lang. C++ 856
ghostview X postscript previewer C 831
gcc * GNU C compiler C 688
iiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiii
lcc Fraser & Hanson’s C cmplr. C 254
rn Net news reader C 221
espresso * PLA minimization C 188
iiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiii
qpt Profiling and tracing tool C 143
awk Pattern scanner & processer C 102
xlisp * Lisp interpreter C 78
iiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiii
eqntott * Boolean eqns. to truth table C 45
addalg Integer program solver C 33
compress File compression utility C 25
iiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiii
grep Search file for regular expr. C 20
poly Polydominoes game C 16
iiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiii
iiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiii
spice2g6 * Circuit simulation F 385
doduc * Hydrocode simulation F 184
fpppp * Two-electron integral deriv. F 168
iiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiii
dnasa7 * Floating point kernels F 90
tomcatv * Vectorized mesh generation F 66
matrix300 * Matrix multiply F 61
iiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiii
costScale Solve minimum cost flow C 41
dcg Conjugate gradient C 41
sgefat Gaussian elimination C 33
iiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiic
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
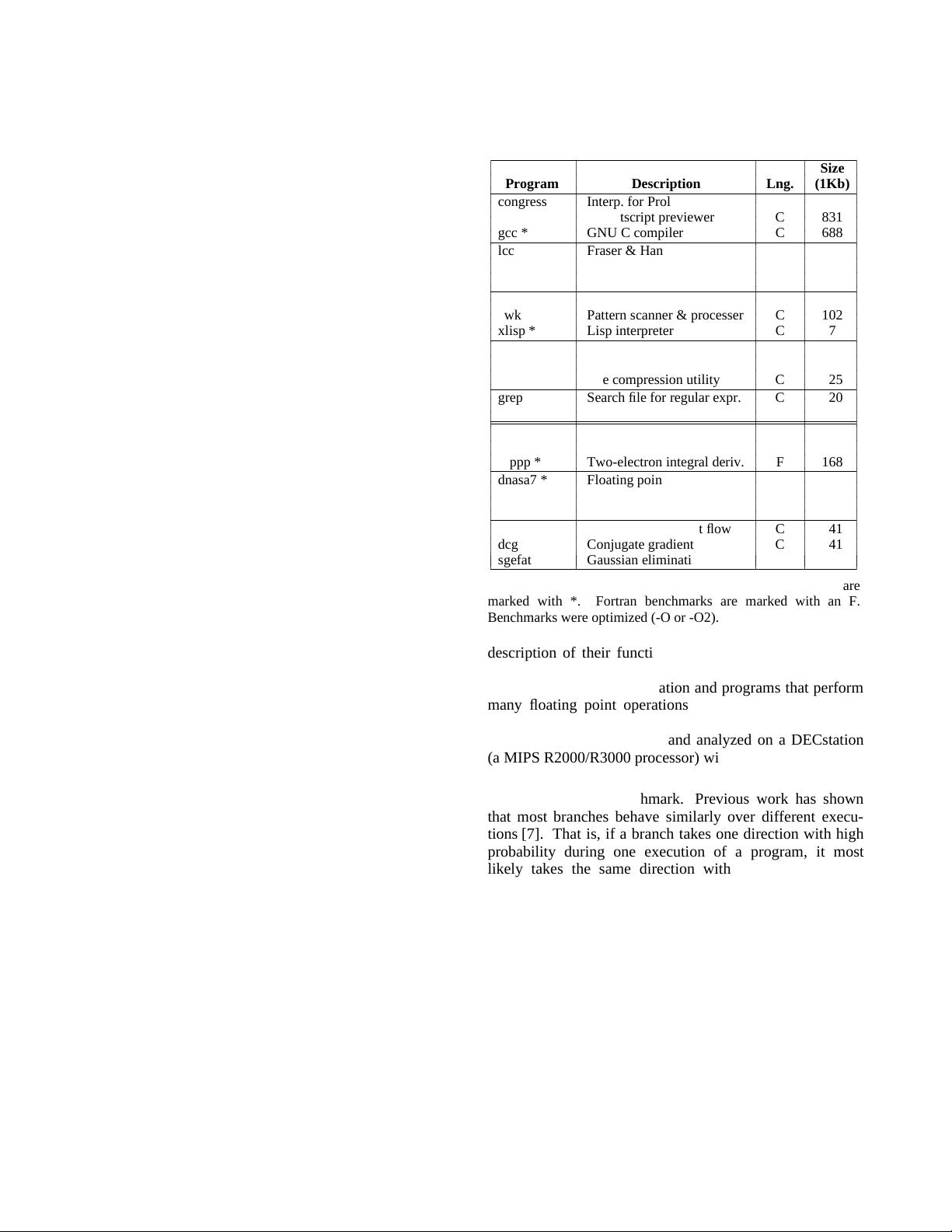
Table 1. Benchmarks, sorted by code size. SPEC benchmarks are
marked with *. Fortran benchmarks are marked with an F.
Benchmarks were optimized (-O or -O2).
description of their function. We have broken the bench-
marks into two major groups: programs that perform little
to no floating point computation and programs that perform
many floating point operations. Within each group, pro-
grams are sorted by the size of their object code. All of the
benchmarks were compiled and analyzed on a DECstation
(a MIPS R2000/R3000 processor) with -O optimization.
The results presented in Sections 3 to 6 are for a single
execution of each benchmark. Previous work has shown
that most branches behave similarly over different execu-
tions [7]. That is, if a branch takes one direction with high
probability during one execution of a program, it most
likely takes the same direction with high probability in
other executions. The goal of this work is to show that
static prediction can accurately determine these branch
directions, rather than confirm previous results. However,
we also tested our predictor on multiple datasets per bench-
mark and found similar results to those of [7]. Section 7
summarizes the results of these experiments.
We are concerned with static branch prediction. That is,
for each branch either the target or fall-thru successor is
predicted, and this prediction does not change during the
execution of the program. Predicting a branch corresponds
to choosing one of the two outgoing edges from the vertex
containing the branch in the control flow graph. For an exe-
cution, the standard for how well static branch prediction
can potentially perform is the perfect static predictor, which
—2—
剩余14页未读,继续阅读
2010-04-30 上传
2022-09-21 上传
2024-11-01 上传

sheyuwang
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- IEEE 14总线系统Simulink模型开发指南与案例研究
- STLinkV2.J16.S4固件更新与应用指南
- Java并发处理的实用示例分析
- Linux下简化部署与日志查看的Shell脚本工具
- Maven增量编译技术详解及应用示例
- MyEclipse 2021.5.24a最新版本发布
- Indore探索前端代码库使用指南与开发环境搭建
- 电子技术基础数字部分PPT课件第六版康华光
- MySQL 8.0.25版本可视化安装包详细介绍
- 易语言实现主流搜索引擎快速集成
- 使用asyncio-sse包装器实现服务器事件推送简易指南
- Java高级开发工程师面试要点总结
- R语言项目ClearningData-Proj1的数据处理
- VFP成本费用计算系统源码及论文全面解析
- Qt5与C++打造书籍管理系统教程
- React 应用入门:开发、测试及生产部署教程
