智能物料机器人:移动平台与Arduino控制系统开发
版权申诉
80 浏览量
更新于2024-06-21
收藏 3.07MB DOCX 举报
"智能物料机器人-移动平台的开发设计"
在当前科技飞速发展的时代,智能物料机器人已经成为工业生产领域的重要组成部分,它们能够自动化地执行物料搬运任务,极大地提高了生产效率和智能化水平。本项目聚焦于智能物料机器人的核心部分——移动平台的开发设计,采用Arduino作为控制系统的核心,旨在实现机器人精准、高效地抓取、搬运和放置物料。
一、硬件选择与设计
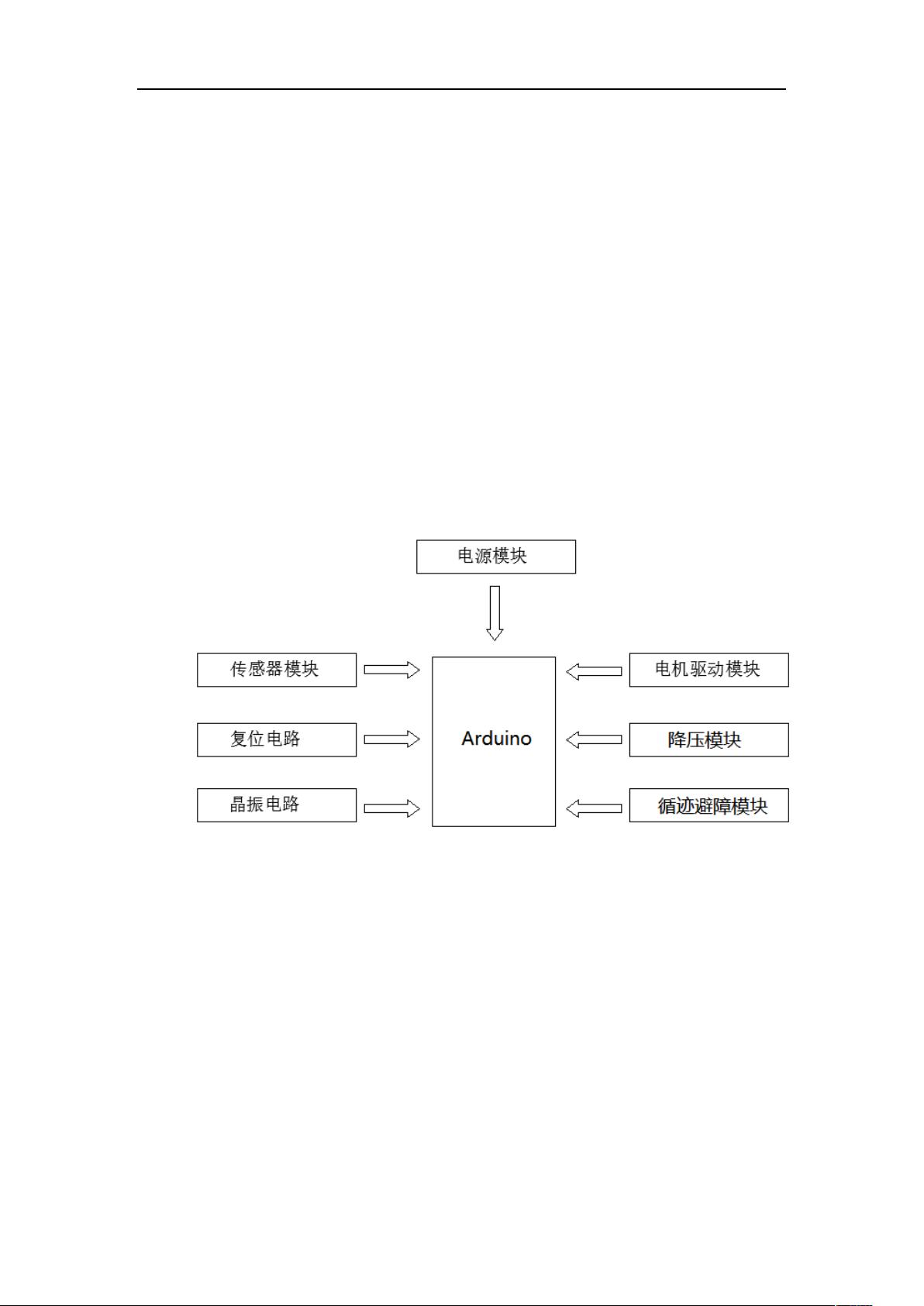
在硬件层面,移动平台的构建需要考虑多个关键组件,包括驱动电机、轮子、传感器以及Arduino主板。驱动电机用于提供动力,确保机器人能够自由移动;轮子的选择应兼顾稳定性与灵活性;传感器则用于感知环境,如使用超声波或激光雷达传感器来实现避障功能,红外或磁性传感器用于循迹控制。此外,还需要设计合适的电路原理图,将这些硬件组件有效地连接和控制。
二、软件控制与编程
基于Arduino的控制系统允许开发者使用C++语言进行编程,实现对机器人移动平台的精确控制。编程过程中,需要编写驱动电机的控制程序,实现前进、后退、转弯等基本动作;同时,结合传感器数据,编写避障和循迹算法,确保机器人在复杂环境中稳定运行。此外,还需要设计一套有效的通信协议,使得移动平台能与机械臂、控制台等其他模块进行协调工作。
三、运动仿真与测试
在实际开发过程中,运动仿真是必不可少的环节。通过计算机模拟,可以预估机器人的动态性能,优化控制策略。在仿真验证无误后,进入实物测试阶段,不断调整和完善机器人的运动控制,确保其在真实环境中的稳定性和准确性。
四、智能决策与优化
随着人工智能技术的应用,智能物料机器人可以集成更高级别的决策系统,如深度学习算法,让机器人能够根据实时环境变化做出适应性决策。例如,通过学习和理解周围环境,机器人可以预测最佳搬运路径,避免拥堵或危险区域。
五、安全与可靠性
在设计中,安全性和可靠性是首要考虑的因素。机器人需具备故障检测和自我修复能力,当发生异常时能及时停机并报警。同时,采取多重保护措施,如限速、限载等,确保机器人在无人监管环境下也能安全运行。
总结,智能物料机器人移动平台的开发设计是一个综合性的工程,涉及到硬件选型、电路设计、软件编程、运动控制等多个方面。通过深入研究和实践,我们可以构建出具有高精度、高效率和高度智能化的物料搬运解决方案,推动工业生产向更高效、更智能的方向发展。

北京理工大学珠海学院 2020 届本科毕业生设计
6
出库入库的任务,高效地保证了各生产工序的加工与整体流程之间无缝衔接,提
高生产效率。
我们设计的智能物料机器人由机械臂、控制台和移动平台三部分组成,其机械
臂是气动结构,可以实现快速精准地夹取放置物料;控制台则是搭载机械臂的三
轴结构以及控制移动平台的运动,将机械臂和移动平台之间的电路结构接入总机
进行联动操控;移动平台是四轮小车结构,用的是能在水平面上全方向运动的麦
克纳姆轮,实现高自由度运动。
我负责的是移动平台的部分,研究目标就是使机器人在生产过程中实现智能循
迹、智能避障、定点停车的功能。模拟机器人的整个工作过程,在机器人搬运物
料时,能够在指定点等待机械臂抓取物料,抓取完毕后移动平台开始循迹运动,
当路线上遭遇障碍时,能不受影响自行躲避,智能到达卸物点,卸物完成后智能
折返回起点,完成这整一个流程。具体的研究内容如下:
1)物料机器人的硬件选型和相关的电路设计。
2)用 Arduino 对每个硬件模块进行数据采集,将采集到的数据用仿真软件进
行仿真,筛选出有效的数据进行编程写入 Arduino 中,完成对模块的控制。
3)编写程序使机器人在预设路线或循迹路径智能躲避障碍,在预设点位完成
停车后,智能折返回起点。
1.3.2 本文研究的基本思路
在整个的研究内容中,关键性的问题为:如何让机器人在工厂、车间等多不
确定因素的环境中实现智能避障,如何实现平稳匀速的工作过程,以及如何定点
停车、与配合机械臂联动等。对于这些问题,本文拟采用的基本思路为:
1)用红外传感器或其他光电传感器检测在各种环境下能否将信号反馈给
arduino。
2)控制电机驱动转速达到指定值,检测指定负载下的运行速度,选取理想转
速值。
3)麦克纳姆轮的使用,需要四个电机正确的转向和转速,才能使整个移动平
台按指定方向移动。
4)移动平台到达指定点时完成停车,接收到单片机发出的启动信号时再进行
折返。
5)合理设置电路布局,优化移动平台外观。
剩余41页未读,继续阅读
2022-07-10 上传
2023-04-03 上传
2022-05-28 上传
2024-03-31 上传
2022-11-30 上传
2022-02-15 上传

南抖北快东卫
- 粉丝: 80
- 资源: 5587
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现小波阈值去噪:Visushrink硬软算法对比
- 易语言实现画板图像缩放功能教程
- 大模型推荐系统: 优化算法与模型压缩技术
- Stancy: 静态文件驱动的简单RESTful API与前端框架集成
- 掌握Java全文搜索:深入Apache Lucene开源系统
- 19计应19田超的Python7-1试题整理
- 易语言实现多线程网络时间同步源码解析
- 人工智能大模型学习与实践指南
- 掌握Markdown:从基础到高级技巧解析
- JS-PizzaStore: JS应用程序模拟披萨递送服务
- CAMV开源XML编辑器:编辑、验证、设计及架构工具集
- 医学免疫学情景化自动生成考题系统
- 易语言实现多语言界面编程教程
- MATLAB实现16种回归算法在数据挖掘中的应用
- ***内容构建指南:深入HTML与LaTeX
- Python实现维基百科“历史上的今天”数据抓取教程
