基于单片机的汽车倒车雷达设计与实现
16 浏览量
更新于2024-06-28
3
收藏 387KB DOC 举报
"该课程设计项目是基于单片机的汽车倒车雷达设计,旨在利用超声波测距技术提供安全的泊车辅助。学生通过比较不同发射接收电路方案,选择了最佳设计方案,并详细介绍了系统的工作原理、硬件设计(包括超声波发射与接收电路、ADC0832转换器)和软件设计(系统流程图和编程程序)。设计目标是创建一个测量范围在0.10-3.00米,精度为10厘米的倒车防撞报警系统,以消除倒车过程中的视觉盲区和安全隐患。设计难点主要集中在超声波信号的发射与接收、报警显示灯电路以及程序流程的实现上。"
在这个课程设计中,学生需要掌握以下几个关键知识点:
1. **超声波测距原理**:超声波是一种高频率的声波,它可以被用于测距,因为它在传播过程中遇到障碍物会反射回来。通过计算发射和接收到超声波的时间差,可以计算出与障碍物的距离。
2. **单片机控制**:单片机作为系统的核心控制器,负责处理所有的数据计算和系统操作。在这个设计中,单片机接收超声波传感器的信号,进行处理并控制报警系统。
3. **超声波发射与接收电路**:发射电路负责产生并发送超声波脉冲,接收电路则接收反射回来的超声波信号。设计中需要考虑如何优化电路以确保信号的准确传输和接收。
4. **ADC(Analog-to-Digital Converter)转换器**:ADC0832是将模拟信号转换为数字信号的设备,用于将超声波传感器接收到的模拟信号转化为数字信号,以便单片机处理。
5. **软件设计**:编写程序来实现系统的功能,包括超声波信号的处理,距离计算,以及根据预设距离进行报警的逻辑控制。系统流程图是程序设计的基础,它描绘了程序运行的步骤和顺序。
6. **报警显示**:当检测到障碍物在安全范围内时,系统应触发报警显示,可能是通过LED灯或其他形式的视觉提示,以警告驾驶员。
7. **精度与范围**:设计要求系统的测量范围为0.10-3.00米,精度为10厘米,这对硬件设计和软件算法提出了较高的精度要求。
通过这个课程设计,学生不仅能够学习到单片机的使用和嵌入式系统的开发,还能深入理解超声波测距技术及其在实际应用中的挑战,同时锻炼了解决问题和优化系统的能力。
3
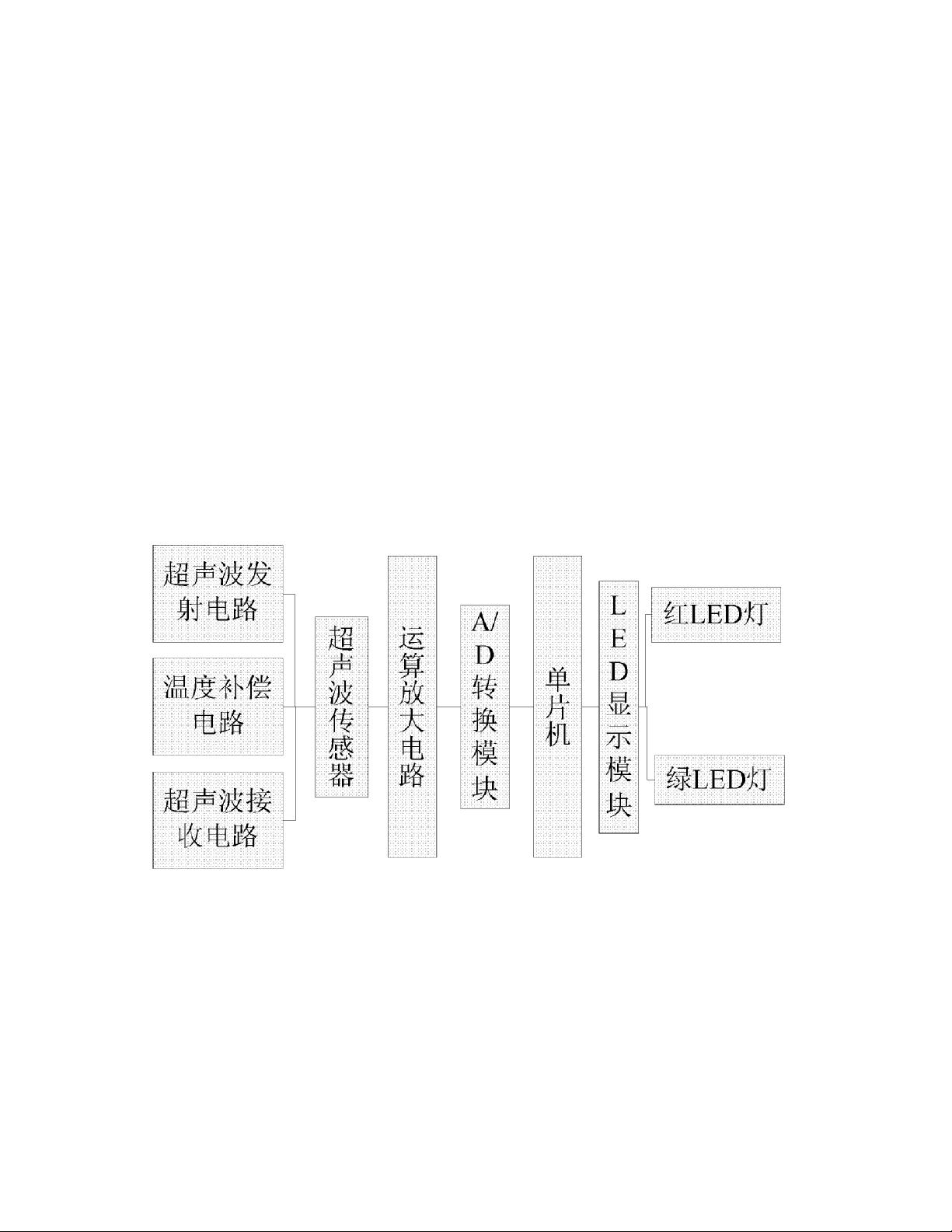
2 总体方案设计
2.1 系统构成图
汽车倒车雷达设计系统单片机为核心外围电路由超声波发射电路、超声波接收
电路、温度补偿电路、A/D 转换模块、LED 显示模块等部分组成。其系统框图如图
2-1 所示。
图 2-1 系统构成图
2.2 工作原理
本系统安装在汽车背后,一般是四个并排,当汽车倒车且接近危险距离(设定
剩余23页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-10-10 上传
2021-09-24 上传
2021-09-18 上传
2021-09-24 上传
2023-07-08 上传
2023-07-01 上传

xinkai1688
- 粉丝: 388
- 资源: 8万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Elasticsearch核心改进:实现Translog与索引线程分离
- 分享个人Vim与Git配置文件管理经验
- 文本动画新体验:textillate插件功能介绍
- Python图像处理库Pillow 2.5.2版本发布
- DeepClassifier:简化文本分类任务的深度学习库
- Java领域恩舒技术深度解析
- 渲染jquery-mentions的markdown-it-jquery-mention插件
- CompbuildREDUX:探索Minecraft的现实主义纹理包
- Nest框架的入门教程与部署指南
- Slack黑暗主题脚本教程:简易安装指南
- JavaScript开发进阶:探索develop-it-master项目
- SafeStbImageSharp:提升安全性与代码重构的图像处理库
- Python图像处理库Pillow 2.5.0版本发布
- mytest仓库功能测试与HTML实践
- MATLAB与Python对比分析——cw-09-jareod源代码探究
- KeyGenerator工具:自动化部署节点密钥生成
