机器人大力士:程序设计与颜色传感器应用
版权申诉
41 浏览量
更新于2024-07-08
收藏 1.74MB DOC 举报
"第10课程序设计——机器人大力士教学案"
本教学案主要围绕如何设计和编程一个机器人大力士,让其参与类似相扑的竞技游戏。在计算机科学和机器人技术的背景下,课程旨在让学生了解和应用颜色传感器进行路径识别,以及编写相应的控制算法。
1. **问题设定**:
- 基于日本相扑比赛的概念,教学案提出了设计一个不会主动出圈并且能在遇到对手时进行互动的机器人大力士的挑战。
2. **简化与实现**:
- 由于人形机器人的制作难度较高,教学案建议使用上节课制作的机器人小车作为基础,以此构建机器人大力士。
3. **技术要点**:
- **颜色传感器**:LEGO EV3套装中的颜色传感器扮演着机器人的眼睛角色,能识别颜色和光线强度。在机器人大力士的设计中,主要利用其"反射光线强度"功能,通过发射红光并测量反射回来的光线百分比来判断地面颜色。
4. **传感器功能**:
- 颜色传感器提供三种功能:颜色识别、反射光线强度检测和环境光强度检测。
- 在机器人大力士的应用中,主要关注反射光线强度,因为这可以帮助机器人识别黑线(通常在白地面上)。
5. **传感器安装**:
- 传感器应朝下安装,最好位于机器人底部,以减少环境光干扰,并防止在比赛中被碰撞。
6. **算法设计**:
- 当机器人前进时,通过颜色传感器持续检测地面颜色。
- 如果检测到的是白色(地面),机器人将持续前进;若检测到黑色(黑线),则机器人需停止、后退并改变方向。
7. **编程**:
- 使用“移动转向”模块,结合“开启”选项来编写程序。具体的编程步骤未在摘要中详细展开,但可以推测会涉及到条件判断语句(如if...else)和循环结构,以实现根据颜色传感器的反馈来调整机器人的行为。
8. **学习目标**:
- 学生将掌握颜色传感器的工作原理和应用方法。
- 了解如何通过编程控制机器人的行动,实现自主导航和避障。
- 体验机器人设计与竞赛的乐趣,培养解决问题和团队合作的能力。
此教学案不仅教授了基础的机器人技术和编程概念,还鼓励学生创新思考,解决实际问题,是计算机教育与实践相结合的良好案例。通过这样的实践活动,学生可以深入理解物理、传感器技术以及计算机编程在机器人领域的应用。
word
4. 阈值的输入
阈值是条件的比拟值,在这里阈值应该是黑色和白色的中间值,举个例子,当
黑色光值为 40,白色光值为 60 时,我们会选择中间的一个值 45 或 55。
如果在机器人前进的过程中,它测到的光值小于阈值,这时机器人会
知道当前位置是在黑线上;当前光值大于阈值即认定为在白色区域上。由此
我们就可以通过比拟来判断当前的位置是白色区域还是黑线。
技能牌:阈值的测量
在 EV3 控制器中打开“port view〞程序块,如图 10-10 所示。选择 col-reflect
功能,即“反射光线强度〞功能。在端口查看中可以看到 1 端口颜色传感器的数
值,数值 X 围是 0-100。测量的时候测两次,传感器放在白色区域读一次值,
值为 96,如图 10-11 所示。放在黑色区域读一次值,值为 4,如图 10-12 所示。
测量值的大小要根据场地的材质,地砖和白色灯箱布的差异还是很大的。
根据我所测量的光值,最终阈值取值为 50。
5 / 23
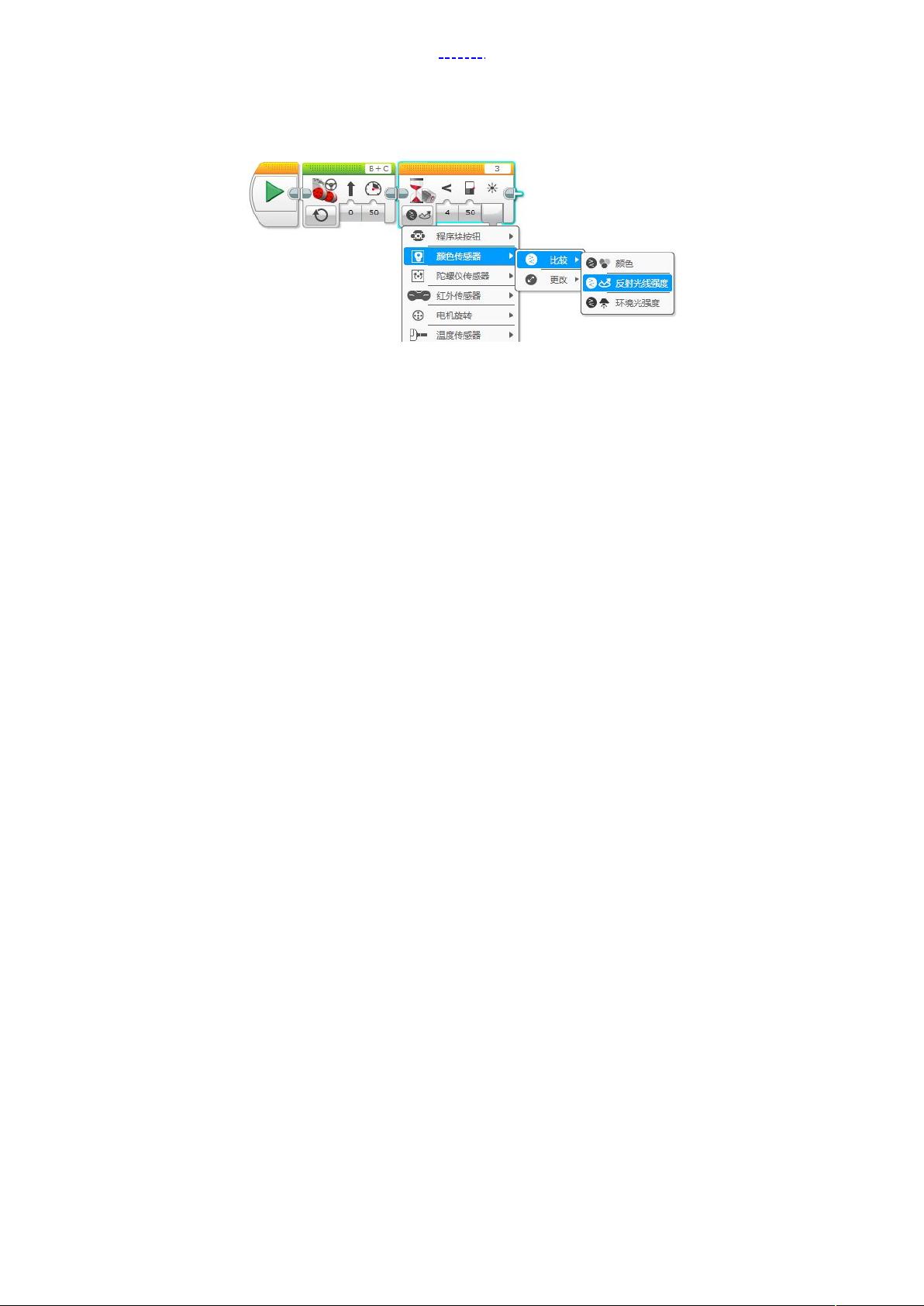
图 10-9 选择反射光线强度
剩余22页未读,继续阅读
2021-12-06 上传
2023-07-15 上传
2023-07-11 上传
2021-12-11 上传
2021-10-10 上传
2021-08-14 上传
2021-08-13 上传

「已注销」
- 粉丝: 0
- 资源: 5万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机等级考试试题计算机等级考试试题
- CSS 中文手册详解
- Android A Programmer's Guide
- jsp网络程序设计课件
- loadrunner中文帮助文档
- Java Reflection in Action
- 软件开发常用英语词汇
- 实例讲解如何排除路由器常见故障
- Linux_C函数库参考手册.doc
- The+Accredited+Symbian+Developer+Primer.pdf
- Expert F# Functional Programming
- Toad 使用快速入门.doc
- ArcGIS Engine的开发与部署
- qtp与td连接方法及常见问题解决方法
- Event-Handling
- 软件工程思想 (视野独特,构思新颖,内容风趣,不落窠臼,令人耳目一新)
