"电机控制进阶:PID速度控制算法详解"
 已收录资源合集
已收录资源合集
需积分: 0 49 浏览量
更新于2023-12-07
2
收藏 316KB DOCX 举报
电机控制进阶 - PID速度控制
本文是在前几篇文章的基础上,继续学习电机控制的内容。通过PID算法,我们可以实现电机速度的控制,并进行实验测试。
PID基础
PID即比例(P),积分(I),微分(D)的缩写。它是一种经典的闭环控制算法,具有原理简单、易于实现、适用面广、控制参数相互独立、参数选定简单等优点。在需要保持某一物理量稳定的场合(例如保持平衡、稳定温度、转速等),PID算法非常有用。
PID算法分类
PID算法可以分为位置式PID和增量式PID两大类。在实际的编程应用中,我们需要使用离散化的PID算法,以适应计算机环境。下面以电机转速控制为例,介绍这两种PID算法的基本原理。
位置式PID
位置式PID通过当前系统的实际位置与期望位置的偏差来进行PID控制。它包括比例项P、积分项I和微分项D三部分。
比例项P表示当前误差e(k)的大小,它与输出控制量的变化成正比。当误差较大时,比例项的作用较大,能够快速调整输出控制量。但是,比例项单独使用时存在超调和震荡等问题。
积分项I表示误差e(k)累加的大小,它可以消除稳态误差,并提高系统响应速度。积分项的作用是将累计的误差逐渐输出,使系统逐渐趋于稳定。
微分项D表示当前误差与前一次误差的差别,它可以用来预测误差的变化趋势,并对输出控制量进行微调。微分项的作用是减小系统的超调和抑制震荡,提高系统的稳定性。
总结起来,位置式PID控制算法的输出控制量可以表示为:
输出控制量 = 比例项P + 积分项I + 微分项D
增量式PID
增量式PID与位置式PID的原理相似,也是通过比例、积分和微分项来控制系统。但是,增量式PID的输入是当前误差与上一次误差之间的差值。
增量式PID的优点是计算简单、输出平稳,适用于嵌入式控制系统。但是,它比位置式PID对噪声和速度变化等干扰更敏感,需要进行适当的抗干扰设计。
使用PID控制实现电机速度控制
在实际的电机控制中,可以通过PID算法来实现电机速度的控制。具体步骤如下:
1. 设置期望速度和采样周期。
2. 读取当前电机的速度。
3. 计算当前误差,即期望速度与当前速度之差。
4. 根据位置式或增量式PID算法计算PID控制量,包括比例、积分和微分项。
5. 根据PID控制量调整电机的输入信号,例如调整PWM信号的占空比。
6. 循环执行上述步骤,直至电机速度稳定在期望速度。
实验测试
为了验证PID控制算法的效果,我们可以进行一些实验测试。可以通过编程控制电机的转速,在给定不同的期望速度下,测试PID控制的稳定性和响应速度。可以记录实际速度与期望速度之间的误差,并进行分析和比较。
总结
通过学习PID控制算法,我们可以实现电机的速度控制,并通过实验测试来验证控制效果。PID算法是一种经典的闭环控制算法,具有很多优点,适用于需要保持某一物理量稳定的场合。在实际的应用中,我们可以根据需求选择位置式PID或增量式PID,并根据实际情况调整PID参数,以实现最佳的控制效果。
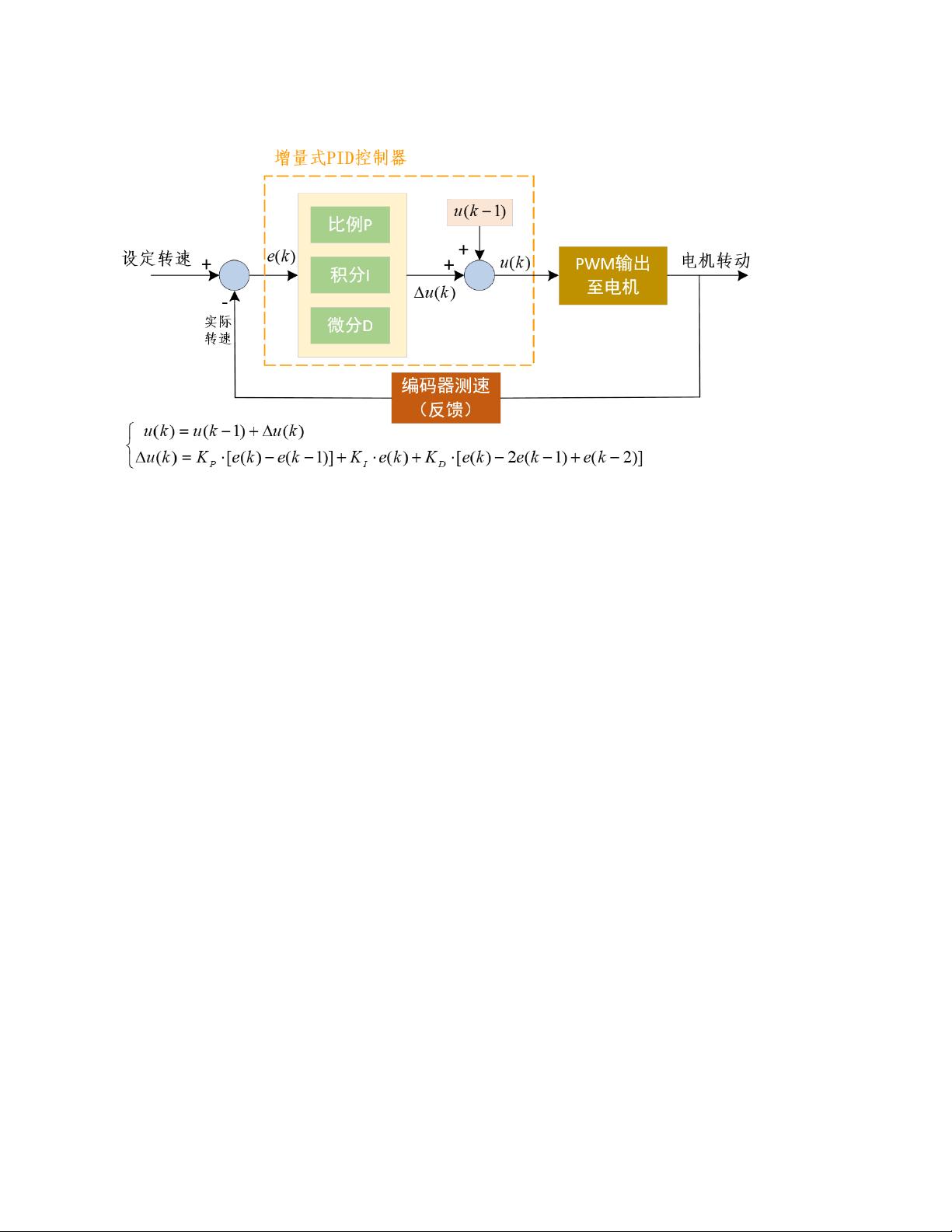
增量式PID
• 比例P:e(k) - e(k-1) 此次误差-上次误差
• 积分I:e(k) 此次误差d
• 微分D:e(k) - 2e(k-1)+e(k-2) 这次误差-2×上次误差+上上次误差
注意增量式PID首先计算的是Δu(k),然后与上次的输出相加,才是此次的输出结果。增量
式PID没有误差累加,控制增量Δu(k)的确定仅与最近3次的采样值有关。
增量式PID算法的伪代码如下:
//
增量式
PID
(伪代码)
previous02_error = 0; //
上上次偏差
previous01_error = 0; //
上次偏差
integral = 0; //
积分和
pid_out = 0; //pid
增量累加和
loop:
error = setpoint − measured_value; /*
误差项:目标值
-
测量值
*/
proportion = error - previous01_error;
/*
比例项:误差项
-
上次偏差
*/
integral = error * dt;
/*
积分项:误差项的累计
*/
derivative = (error − 2*previous01_error + previous02_error) /
dt;/*
微分项:上次误差与上上次误差的变化率
*/
/*
或写成:
derivative = ( (error − previous01_error)/dt - (previous01_error
- previous02_error)/dt )*/
pid_delta = Kp × error + Ki × integral + Kd × derivative;
//
计算得到
PID
增量
剩余14页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-06-07 上传
2023-05-25 上传
2022-06-09 上传
2022-12-15 上传
2022-05-30 上传
2022-06-22 上传

CodingLife99
- 粉丝: 1222
- 资源: 457
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
