6-SPS球平台并联机器人:性能分析与应用
需积分: 9 49 浏览量
更新于2024-09-12
收藏 175KB PDF 举报
"并联机器人,6-SPS球平台并联机器人,力和运动传递性能分析,金振林,高峰,燕山大学机械工程学院,河北工业大学"
本文主要探讨了一种名为6-SPS球平台的并联机器人,这是一种6自由度正交并联机器人新机型。并联机器人因其高精度、高刚度、小的自重负荷比和优良的动力学性能而备受关注。Stewart平台机构是6自由度并联机器人中最知名的类型,广泛应用于各种领域,包括虚轴机床、地下开采、飞行模拟等。然而,通过优化机器人的布局型式可以进一步提升其性能,这成为并联机器人研究的重点。
作者金振林和高峰提出了6-SPS球平台机器人,它是Stewart平台机构的一种变异形式。这种新机构由运动平台、6个SPS运动链和基座构成,每个SPS运动链包含一个直线移动副作为驱动副。机器人的独特之处在于其球铰点的布局:6个与运动平台连接的球铰点和6个与基座连接的球铰点分别位于两个不同半径的三维圆球上,且6个运动链分为三对,每对分支与平台的连接呈对称分布。
对这种球平台机构的局部力与运动传递性能进行了分析,研究了这些性能与机构几何参数的关系。分析结果表明,在正交位姿下,该机构在力和运动传递方面表现出各向同性,这意味着它在各个方向上的性能一致。这种特性使其特别适用于需要精细操作的场合,例如6自由度微动操作机器人或6维力传感器结构。
文章进一步详细介绍了球平台机构的坐标系建立方法,并对结构特点进行了描述。通过这样的分析,为并联机器人的设计和实际应用提供了理论基础,有助于提升并联机器人在特定任务中的性能表现。
关键词涉及的“6自由度并联机器人机构”是指具有六个独立运动自由度的机器人,可以进行全方位的运动。“球平台机构”特指这种机器人结构中使用球铰点连接的平台部分。“正交位姿”是指机器人处于各个轴向运动相互垂直的状态。“各向同性”意味着在所有方向上的物理性质相同,对于并联机器人来说,意味着在所有方向上力和运动的传递性能都一致。“力和运动传递”是研究机器人如何将动力源的运动和力量传递到工作末端的关键概念。
这篇论文深入研究了一种创新的并联机器人设计,通过分析其力学性能和运动传递特性,为并联机器人技术的进步和实际应用提供了新的思路和理论支持。
文章编号 1004-924
X
( 2001) 01-0063-04
6- SPS 球平台并联机器人
及其局部力和运动传递性能分析
金振林
1
, 高 峰
2
( 1. 燕山大学机械工程学院, 河北 秦皇岛 066004;
2. 河北工业大学, 天津 300130)
摘要: 提出一种 6-SPS 球平台 6 自由度正交并联机器人新机型, 介绍其结构布局特点, 对其局部力与运
动传递性能及它们与机构几何参数关系进行分析, 为其设计和实用化提供理论依 据。分析结果表明, 该
球平台机构在正交位姿力和运动传递性能各向同性, 特别适合于作为 6 自由 度微动操作机器人和 6 维
力传感器结构。
关 键 词: 6 自由度并联机器人机构; 球平台机构; 正交位姿; 各向同性
中图分类号:
T P
242 文献标识码:
A
1 引 言
并联机器人是一类全新结构的机器人, 具有
精度高、刚度大、自重负荷比小和动力学性能好等
优点。最著名的 6 自由度并联机器人机构是 1965
年由英国工程师 St ewart 提出的 St ew art 平台机
构
[ 1]
, 它已应用于虚轴机床、地下开采、水下作业、
飞行模拟、空中救援、飞船对接、卫星天线定位、微
动操作和机器人力传感器等领域
[ 2- 3]
。并联机器
人机构性能的改善, 可借助于机器人布局型式的
合理设计来实现, 所以具有新型布局型式的机构
设计作为并联机器人机构研究的重要内容, 受到
国内外许多学者的重视
[ 4- 8]
。本文通过对
St ew art
平台机构变异, 提出一种新颖的并联 6-SPS 球平
台并联机器人机构, 介绍其布局特点并对其局部
力与运动传递性能和机构几何参数关系进行了分
析, 为其实用化提供理论依据。该球平台机构在正
交位姿是力和运动学各项同性的, 特别适合于作
为 6 自由度微动操作机器人和 6 维力传感器结
构。
2 球平台机构布局特点及坐标系的
建立
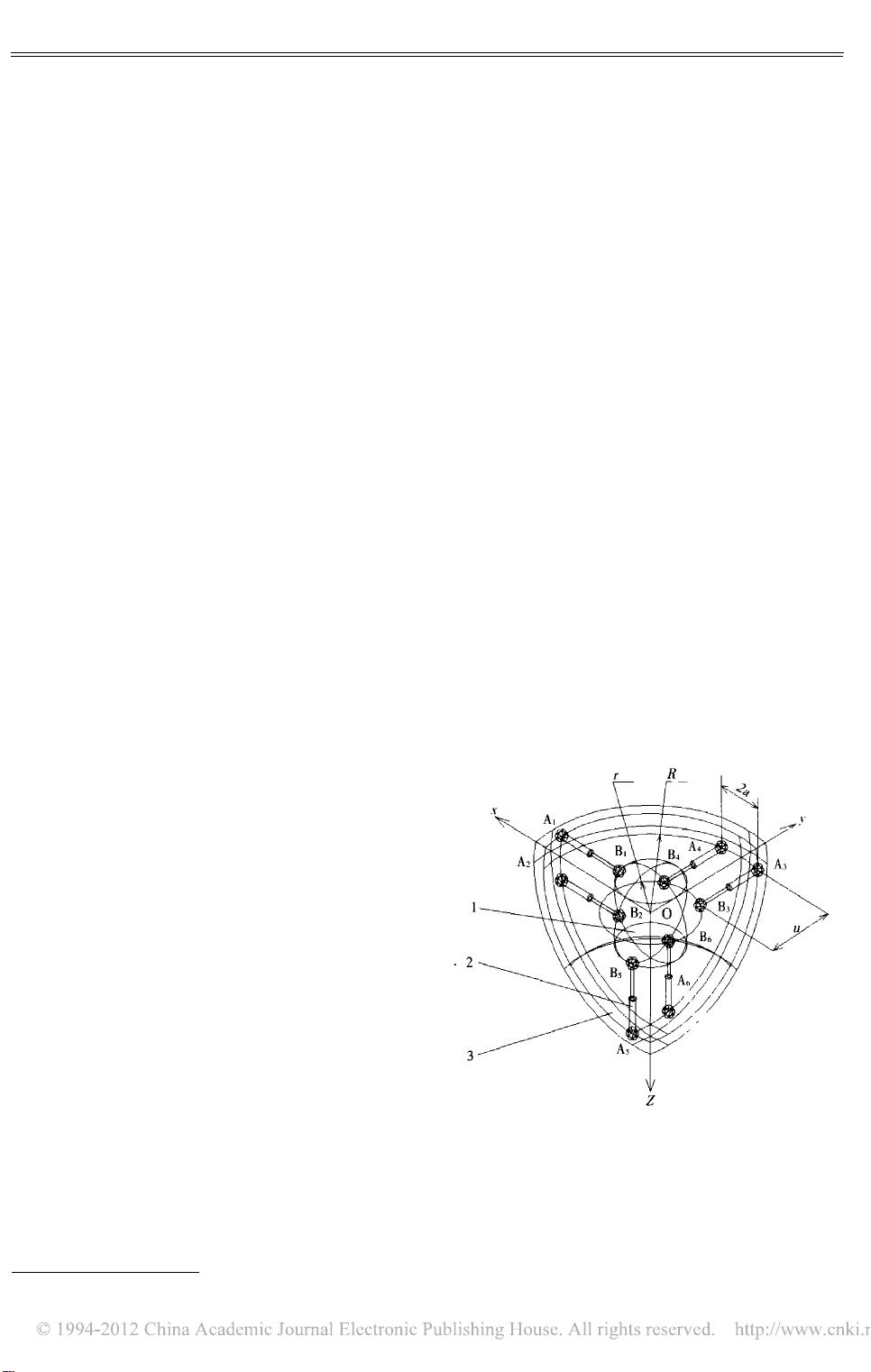
如图 1 所示一种新型 6- SPS 球平台 6 自由
度并联机器人机构, 这种机构是
Stew art
平台机
构( 如图 2 所示) 经过变异得到的一种新机构, 与
St ew art
平台机构具有相同的运动学模型, 它由
运动平台 1、6 个 SPS 运动链 2 和基座 3 组成, 其
球铰点布局有以下特点: ( 1) 其与运动平台相连的
6 个球铰点和其与基座相连的 6 个球铰点分别分
布在半径为
r
和
R
的两个三维圆球上; ( 2) 每 1 个
SPS 运动链构成 1 个分支, 分支中直线移动副为
驱动副, 6 个分支分为三对, 各对分支与运动平台
相连的两个球铰点的距离均为 2a, 且分别分布在
通过运动平台球心的三个互相垂直的平面上; ( 3)
与基座相连的 6 个球铰点的分布特点和运动平台
上的 6 个球铰点相似。当运动平台的球心和基座
的球心重合, 且三对分支的轴线互相垂直时, 该机
构处于正交位姿。
1.
mo ving platfo r m
; 2.
SPS kinemat ic chain
; 3.
base
Fig
. 1
A nov el
6-
SP S spherical platfor m parallel r obo tic
mechanism
收稿日期: 2000-08-01; 修订日期: 2000-08-23
基金项目: 燕山大学科技发展基金资助项目(
YDJJ
2006)
第 9 卷 第 1 期
光学 精密工程
Vol. 9, No. 1
2 0 0 1 年 2 月
OP T ICS A N D PR ECI SION EN GI NEER IN G
Feb. , 2001
下载后可阅读完整内容,剩余3页未读,立即下载
840 浏览量
2712 浏览量
MATLAB仿真:线性Delta并联机器人正逆运动学及直线三角洲Delta并联机器人研究,MATLAB线性delta并联机器人仿真正逆运动学,直线三角洲delta并联机器人 ,MATLAB; 线性de
2025-01-30 上传
2025-01-30 上传
2025-02-22 上传
162 浏览量
2025-01-04 上传
MATLAB环境下Stewart并联机器人逆运动学仿真与Simscape仿真研究,MATLAB仿真Stewart并联机器人逆运动学仿真simscape仿真 ,核心关键词:Stewart并联机器人;逆运
2025-01-31 上传
2025-01-19 上传

wshuanghua
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 理解AJAX基础与实现
- BEA Tuxedo精华贴总结:程序示例与环境变量设置
- TUXEDO函数详解:tpalloc, tprealloc, tpfree, tptypes与FML操作
- Windows CE预制平台SDK掌上电脑1.1中文版使用指南
- 21DT数控车床编程指南:操作与编程指令详解
- 随机化算法:原理、设计与应用探索
- PB编程入门:核心函数详解与知识架构构建
- Ant实战教程:从入门到精通
- DB2 SQL语法指南:从创建到索引详解
- Java GUI设计入门:AWT与Swing解析
- VCL 7.0继承关系详解:完整对象树与可用版本区分
- 十天精通ASP.NET:从安装到实战
- 有效软件测试的关键策略
- ARM ADS1.2开发环境与AXD调试教程
- 详述JSTL:核心、I18N、SQL与XML标签库解析
- ×××论坛系统概要设计说明书
