智能小车设计与实现:AT89S52控制核心,超声波测距,实现自动超车功能。
版权申诉
70 浏览量
更新于2024-02-26
收藏 555KB DOC 举报
本系统是以AT89S52单片机为控制核心的智能小车的设计,采用L298构成电机驱动电路,利用红外对管检测黑线,同时还用超声波传感器实现两车距离的测量,完成超车功能,其中速度由单片机输出的PWM波控制。AT80S52单片机是一款八位单片机,它的易用性和多功能性受到了广大使用者的好评。由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量度方面能达到工业实用的要求,因此在移动机器人的研制上也得到了广泛的应用。
在系统设计方面,设计要求包括甲车车头紧靠起点标志线,乙车车尾紧靠边界。甲、乙两辆小车同时起动,先后通过起点标志线,在行车道同向而行,实现两车交替超车领跑功能。基本要求包括甲车和乙车分别从起点标志线开始,在行车道各正常行驶一圈。甲、乙两车按图所示位置同时起动,乙车通过超车标志线后在超车区内。这些要求为智能小车设计提供了明确的目标和方向。
整个系统的设计和实现涉及到硬件和软件方面的技术。AT89S52单片机作为控制核心,通过PWM波控制电机速度,L298构成电机驱动电路,红外对管检测黑线,超声波传感器实现两车距离的测量。这些元件的协调配合,以及单片机的编程设计都是整个系统成功实现的关键。
AT89S52单片机作为控制核心具有良好的易用性和多功能性,得到了广大用户的好评。超声波作为测距的利器,由于其指向性强,能量消耗缓慢,且传播的距离较远,因此在移动机器人的研制上得到了广泛的应用。其在系统设计中的运用为智能小车提供了准确的距离测量和实时控制,从而保证了系统的稳定性和可靠性。
在智能小车设计与实现过程中,硬件和软件的完美结合起到了关键作用。硬件方面的L298电机驱动电路、红外对管和超声波传感器等为系统的功能实现提供了基础支持,而单片机的软件编程则实现了系统的控制和运行。这样的设计实现不仅提升了智能小车的性能,也为类似系统的发展提供了有益的经验和借鉴。
总的来说,本系统的设计与实现基于AT89S52单片机,结合L298电机驱动电路、红外对管和超声波传感器,以及单片机的软件编程。通过对系统的功能要求和硬件软件的协调设计,成功实现了智能小车的设计与实现,为智能小车技术的进步和发展提供了重要的参考和借鉴。
- 5 -
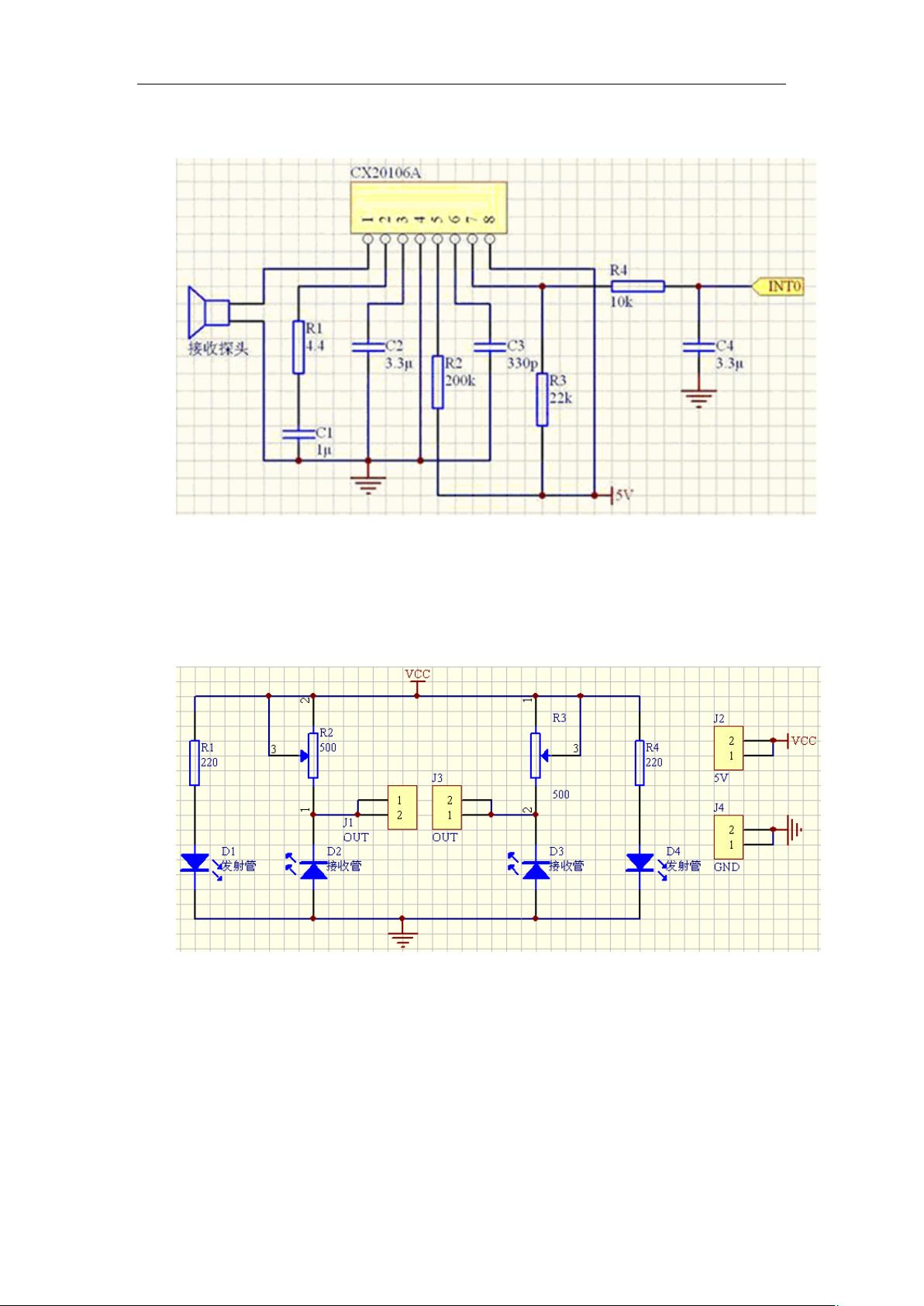
图7所示:
图7 超声波接收电路
红外线发射与接收电路:红外收发对管是一种利用红外线的开关管,接受管
在接受和不接受红外线时电阻了发生明显变化,利用外围电路可以使输出产生明
显的高低电平的变化,高低电平的变化输入单位片机就可使之识别,从而实现智
能控制。电路图如下:
电源电路:根据题目要求,本系统使用电池供电,单片机必须与大电流器件
分开供电,避免大电流器件对单片机造成干扰。采用两路供电,这样可以使用其
中一路单独为单片机、指示灯供电,另外一路为L298等供电。下图为双5V电源电
路:
剩余23页未读,继续阅读
2022-06-30 上传
2022-06-30 上传
229 浏览量
2023-06-25 上传
2022-07-16 上传
2021-09-18 上传
2024-01-16 上传
2021-10-02 上传

等天晴i
- 粉丝: 5981
- 资源: 10万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- PyDeduplication:大多数只是重复数据删除
- restmachine:用于PHP的Web机器实现
- torch_sparse-0.6.4-cp38-cp38-win_amd64whl.zip
- EMD matlab相关工具(包含EEMD,CEEMDAN)
- matlab的slam代码-ORB_SLAM2_error_analysis:ORB_SLAM2_error_analysis
- jdk1.8安装包:jdk-8u161-windows-x64
- head-in-the-clouds:与提供商无关的云供应和Docker编排
- init:环境初始化脚本
- 英雄
- torch_cluster-1.5.6-cp36-cp36m-win_amd64whl.zip
- 关于VSCode如何安装调试C/C++代码的傻瓜安装
- 导航菜单下拉
- Bird
- raspberry-pi-compute-module-base-board:Raspberry Pi计算模块的基板
- 晶格角
- thrift-0.13.0.zip
