多IMU融合算法:轻量级高精度定位方案
需积分: 50 131 浏览量
更新于2024-08-05
3
收藏 1.59MB PDF 举报
"本文提出了一种轻量级且精确的多IMU(惯性测量单元)定位算法,通过融合多个IMU以及外部感知传感器的信息来提高定位精度。IMU是一种低成本的运动传感器,能提供旋转速度和重力补偿的线性加速度测量,广泛应用于现代定位系统。尽管单个IMU的定位在各种场景下表现出可接受的准确性和鲁棒性,但通过使用多个IMU可以进一步提升整体性能。为此,该算法旨在融合来自多个IMU及外部传感器的测量数据,以显著提升性能,同时不增加计算负担。为了实现这一目标,首先对多个IMU的测量结果进行概率映射,然后采用一种融合策略来处理这些信息,确保定位的准确性和实时性。此外,该算法还考虑了传感器误差校正和数据关联问题,以减小误差积累并提高长期稳定性。实验结果表明,与仅使用单个IMU的方案相比,提出的多IMU融合算法在定位精度和可靠性方面有显著优势,尤其适用于需要高精度定位的复杂环境和动态场景。"
这篇论文的核心知识点包括:
1. 多IMU融合:传统的惯性导航系统通常依赖于单一的IMU,而本文提出的方法利用多个IMU的互补性,通过融合不同IMU的数据,提高整体定位的准确性和鲁棒性。
2. 概率映射:在融合多个IMU数据的过程中,采用了概率方法对测量值进行处理,这有助于处理传感器之间的不确定性,并为融合过程提供了统计基础。
3. 外部感知传感器融合:除了IMU,该算法还结合了其他外部感知传感器的数据,如GPS、雷达或视觉传感器,以增强定位性能,特别是在GPS信号弱或者室内环境中。
4. 误差校正和数据关联:为了减少由于传感器误差和动态环境变化导致的定位漂移,该算法包含了误差校正机制,并解决了不同传感器数据之间的关联问题。
5. 轻量级设计:尽管增加了融合的复杂性,但算法设计时考虑了计算效率,确保在不增加过多计算负载的情况下,实现更优的定位性能。
6. 性能提升:通过实验验证,多IMU融合算法在定位精度和实时性上优于单IMU系统,特别适用于对定位精度要求高的应用,如自动驾驶、无人机导航等。
这种多IMU融合的算法不仅深化了我们对惯性导航系统理解,也为实际应用中的高精度定位提供了新的解决方案。
IEEE ROBOTICS AND AUTOMATION LETTERS. PREPRINT VERSION. ACCEPTED JANUARY, 2020 1
A Lightweight and Accurate Localization Algorithm
Using Multiple Inertial Measurement Units
Ming Zhang, Xiangyu Xu, Yiming Chen, and Mingyang Li
Abstract—This paper proposes a novel inertial-aided local-
ization approach by fusing information from multiple inertial
measurement units (IMUs) and exteroceptive sensors. IMU is a
low-cost motion sensor which provides measurements on angular
velocity and gravity compensated linear acceleration of a moving
platform, and widely used in modern localization systems. To
date, most existing inertial-aided localization methods exploit
only one single IMU. While the single-IMU localization yields
acceptable accuracy and robustness for different use cases, the
overall performance can be further improved by using multiple
IMUs. To this end, we propose a lightweight and accurate
algorithm for fusing measurements from multiple IMUs and
exteroceptive sensors, which is able to obtain noticeable per-
formance gain without incurring additional computational cost.
To achieve this, we first probabilistically map measurements
from all IMUs onto a virtual IMU. This step is performed
by stochastic estimation with least-square estimators and prob-
abilistic marginalization of inter-IMU rotational accelerations.
Subsequently, the propagation model for both state and error
state of the virtual IMU is also derived, which enables the
use of the classical filter-based or optimization-based sensor
fusion algorithms for localization. Finally, results from both
simulation and real-world tests are provided, which demonstrate
that the proposed algorithm outperforms competing algorithms
by noticeable margins.
Index Terms—Sensor Fusion; Localization; SLAM.
I. INTRODUCTION
I
N recent years, commercial products which exploit inertial
measurement units (IMUs) have been under fast develop-
ment. This popular motion sensor can be found in robotics,
personal electronic devices, wearable devices, and so on [1].
On one hand, the maturity of MEMS manufacturing process
significantly reduces the size, price, and power consumption
of the IMU hardware. On the other hand, significant progress
has also been made in both algorithm and software design
for IMUs, ranging from sensor characterization and calibra-
tion [2]–[5], measurement integration [6]–[8], sensor fusion
[9]–[13], and so on.
In this work, we focus on the inertial-aided localization,
which is to estimate the 6D poses (3D position and 3D
orientation) of a moving platform. Since localization with
only IMU inevitably suffers from pose drift, measurements
from other sensors (i.e. aiding), e.g., RGB cameras, depth
Manuscript received: September, 10, 2019; Revised December, 17, 2019;
Accepted January, 13, 2020.
This paper was recommended for publication by Editor Eric Marchand upon
evaluation of the Associate Editor and Reviewers’ comments.
The authors are with Alibaba Group, Hangzhou,
China. {mingzhang, xiangyuxu, yimingchen,
mingyangli}@alibaba-inc.com.
Digital Object Identifier (DOI): see top of this page.
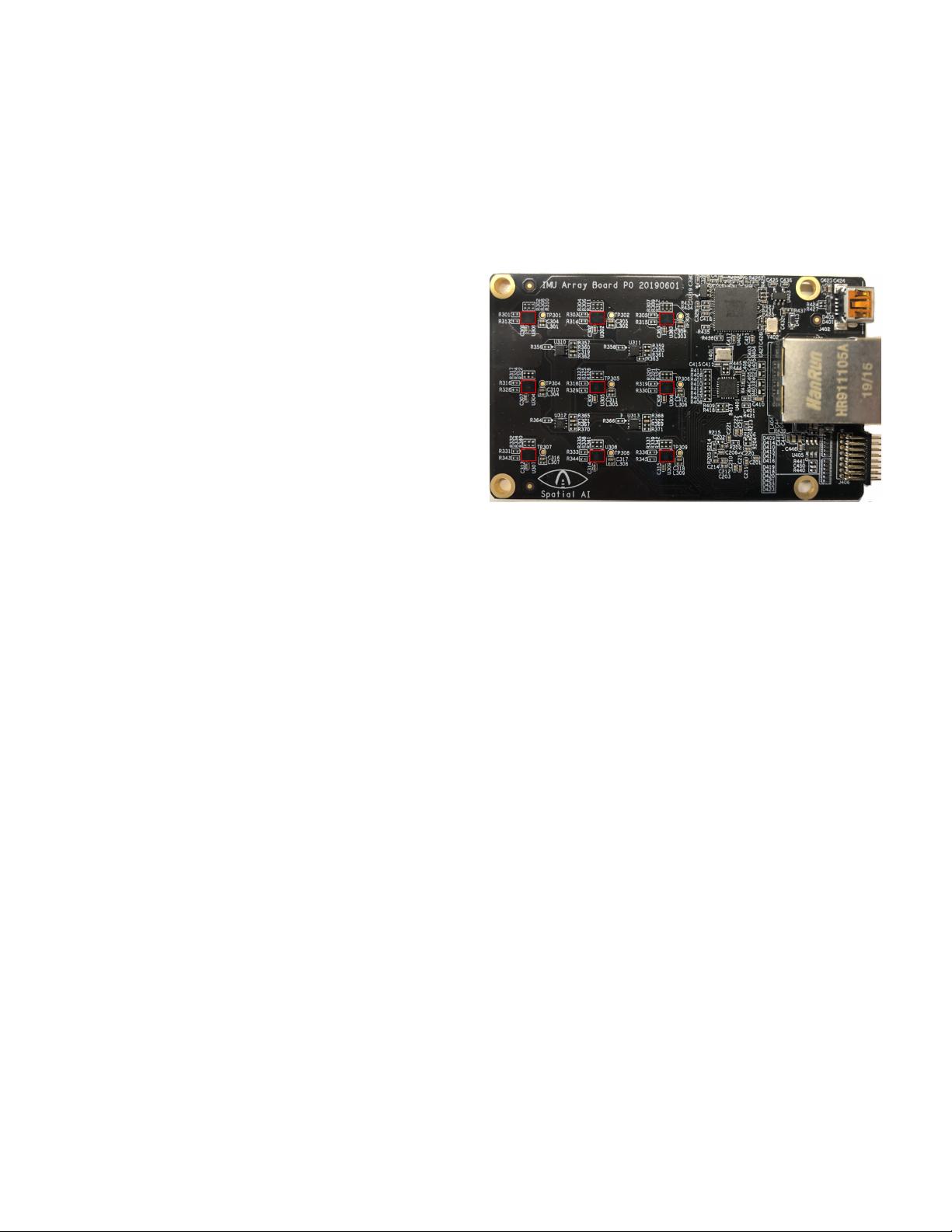
Fig. 1. The IMU array board used in this work, which contains nine ST
LSM6DSOX IMUs marked by red rectangles and a processor interface to
connect cameras. The IMUs are synchronized by an embedded processor.
cameras, or LiDARs (Light Detection And Ranging sensors),
are typically used in combination with IMUs to provide long-
term performance guarantees [12], [14], [15]. To perform
accurate pose estimation, the majority of existing works use
measurements from IMU for pose prediction, which is fol-
lowed by probabilistic refinement using measurements from
other sensors [7]–[12].
To date, most algorithms on inertial-aided localization are
designed based on a single IMU [7]–[13]. Although these
algorithms are successfully deployed in different applications,
using additional IMU sensors creates new possibilities for
further improving the system accuracy and robustness. Com-
pared to other popular sensors for localization (e.g., cameras
or LiDARs), IMUs especially the off-the-shelf MEMS ones
are priced only hundredths or thousandths, and of smaller
size as well as lower power consumption. In addition, as a
reliable proprioceptive sensor, IMU also poses less restrictions
on operating environments and hardware configurations (in
contrast, e.g. stereo cameras require enough spatial baseline
to achieve performance gain [16], [17], which might not be
feasible on various applications including mobile devices).
Most existing methods on using multiple IMUs focus on
processing IMU measurements only or integration with global
navigation satellite systems (GNSS) [10], [18], [19]. Fusing
measurements from multiple IMUs with exteroceptive sensors
for localization is a less-explored topic. To the best of the
authors’ knowledge, the only work in recent years in this
domain is [20], which proposed an approach for vision-aided
inertial navigation using measurements from multiple IMUs.
However, the proposed algorithm is of significantly increased
arXiv:1909.04869v2 [cs.RO] 17 Jan 2020
下载后可阅读完整内容,剩余7页未读,立即下载
2021-05-26 上传
2020-10-08 上传
128 浏览量
2023-07-04 上传
2023-08-13 上传
2023-07-09 上传
2023-09-08 上传
2023-12-22 上传
2023-05-21 上传

Pasding
- 粉丝: 1
- 资源: 14
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新代数控API接口实现CNC数据采集技术解析
- Java版Window任务管理器的设计与实现
- 响应式网页模板及前端源码合集:HTML、CSS、JS与H5
- 可爱贪吃蛇动画特效的Canvas实现教程
- 微信小程序婚礼邀请函教程
- SOCR UCLA WebGis修改:整合世界银行数据
- BUPT计网课程设计:实现具有中继转发功能的DNS服务器
- C# Winform记事本工具开发教程与功能介绍
- 移动端自适应H5网页模板与前端源码包
- Logadm日志管理工具:创建与删除日志条目的详细指南
- 双日记微信小程序开源项目-百度地图集成
- ThreeJS天空盒素材集锦 35+ 优质效果
- 百度地图Java源码深度解析:GoogleDapper中文翻译与应用
- Linux系统调查工具:BashScripts脚本集合
- Kubernetes v1.20 完整二进制安装指南与脚本
- 百度地图开发java源码-KSYMediaPlayerKit_Android库更新与使用说明
