全向轮式移动机器人在羽毛球比赛中的应用与设计
版权申诉
16 浏览量
更新于2024-06-23
收藏 1.3MB DOC 举报
"本文档主要探讨了机器人羽毛球比赛行走装置的设计,着重研究了全方向轮式移动机器人的行走机构。文章涵盖了移动机器人技术的现状、发展趋势,全向轮的类型及其特性,以及移动机器人的关键技术和应用领域。同时,文档详细阐述了设计过程,包括STM32主控芯片的应用、CAN总线通信、机械装置的设计和动力学模型的建立。"
在移动机器人领域,轮式机器人因其速度、稳定性和负载能力的优势,被广泛应用于服务、巡检和探测等场景。设计中,作者关注的是全方向轮式移动机器人,这种机器人可以实现灵活的全方位移动,尤其适合羽毛球比赛这样的高速动态环境。论文首先综述了三轴轮式移动机器人的国内外研究现状,分析了其优点和局限性,并探讨了移动机器人的关键技术,如自主导航、控制策略等。
接着,文档深入讨论了全方位移动平台的轮系布局,对比了二轮和四轮布局的优缺点。在这一部分,作者构建了通用底盘的动力学模型,以理解机器人在不同条件下的运动特性。此外,还介绍了STM32微控制器,它是控制系统的核心,负责处理传感器数据和执行运动控制算法。STM32芯片的选择是因为其强大的计算能力和低功耗特性。
CAN总线作为一种高效的车辆通信协议,在机器人通信中也扮演着重要角色。文档详细解释了CAN总线的主要特点,如高可靠性、实时性以及抗干扰能力,这些特性使得CAN总线成为机器人内部组件间通信的理想选择。在硬件设计中,还包括了电机驱动电路和稳压电路的设计,确保机器人动作的精确和稳定。
软件原理设计部分,作者可能详细阐述了如何使用编程语言和相关软件工具来实现机器人的运动控制、路径规划和感知环境等功能。这部分内容可能涉及算法设计、状态机实现以及错误处理机制等。
这篇文档全面地介绍了机器人羽毛球比赛行走装置的设计过程,从理论分析到硬件选型,再到软件开发,为读者提供了丰富的移动机器人设计知识,特别是对于全向移动机器人在特殊应用场景中的设计实践有着重要的参考价值。
主要有三个模块,这三个模块包括移动控制模块,升降控制模块,椅子和声纳模块。
各个模块有着不同的作用,相应的模块接受相应的指令,并且相互独立,不会相互影
响。
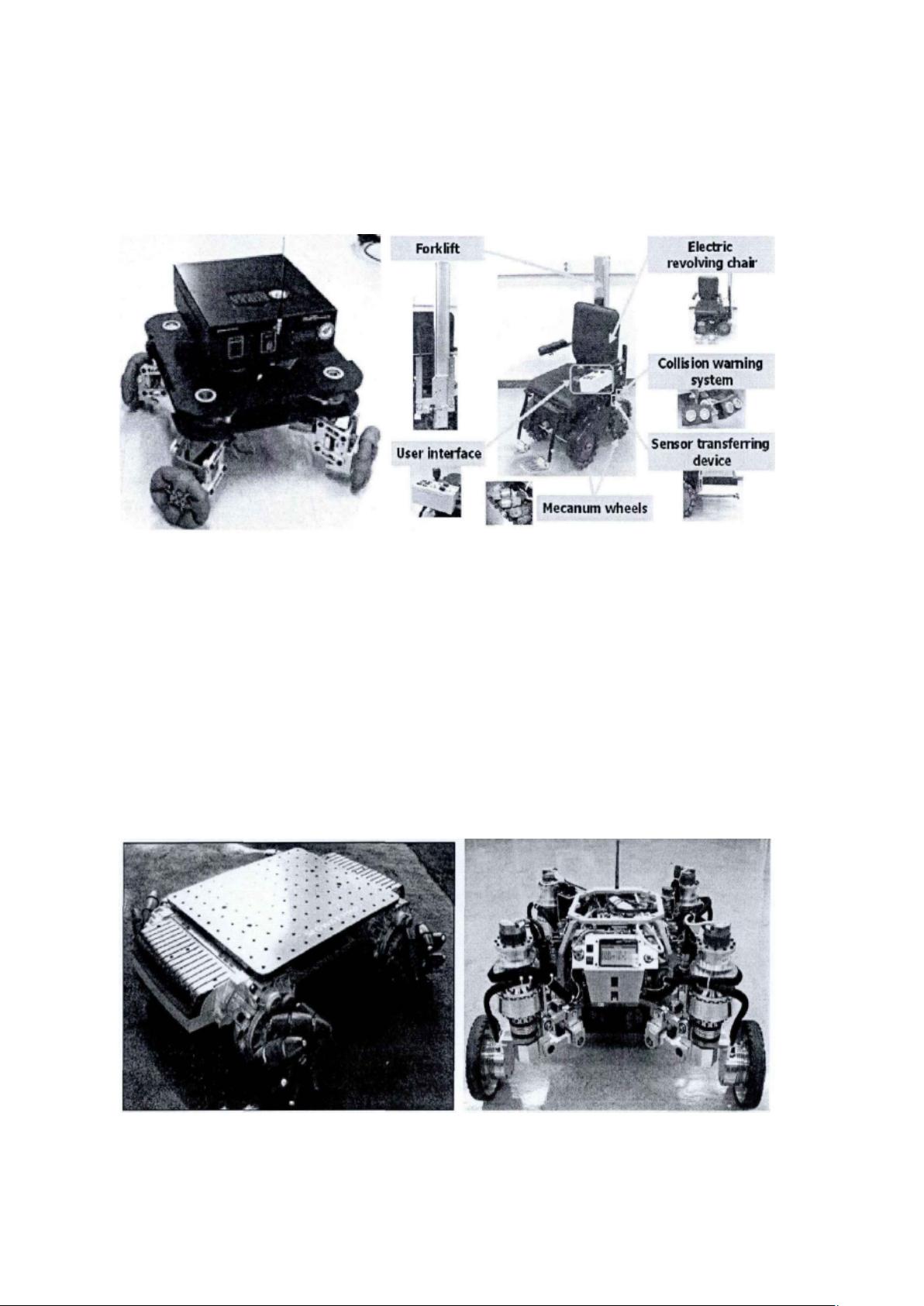
图 1-4 全方位移动机器人 图 1-5 辅助移动机器人
赛格威在美国匹兹堡机器人会议和展览上,推出一个简单的自动输送机(如图
1-6)。赛格威全方位移动机器人平台可以有效承载 400 磅东西,主要应用于军工,院
校和仓库。该平台可在所有方向上从静止状态下移动,使得它在小空间中最合适的工
作。 加拿大布鲁克大学开发 AZIMUT - 3 移动平台,(如图 1-7)。 AZIMUT 有 4
个独立的关节可以是圆形,轮式或履带或这些条件的组合。通过改变接头的方向,
AZIMUT 横向运动,而不改变车体的方向。所有这些能力使得机器人具有在狭窄的空
间中移动的能力。 AZIMUT 被设计为放置在关节使车轮可通过腿部容易更换的驱动
机构是高度模块化,这样。通过在接头安装了电动垂直悬挂和柔性驱动使这个平台可
以增强它的稳定性和灵活性。放在驱动接头和传感器的弹性单元可感测并控制驱动关
节的扭矩。提高对恶劣的地形移动机器人,使机器人能够“感觉”跌宕起伏的道路。
图 1-6 Segway 机器人移动平台 图 1-7 The AZIMUT-3 platform
剩余29页未读,继续阅读
2023-07-13 上传
2023-07-12 上传
2023-07-13 上传
2023-07-12 上传
2023-07-12 上传

老帽爬新坡
- 粉丝: 93
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







