新型BLDC驱动五自由度并联机器人运动控制实现与实验验证
39 浏览量
更新于2024-09-02
收藏 244KB PDF 举报
本文主要探讨了基于无刷直流电机(BLDC)的新型五自由度并联机器人运动控制系统的设计与实现。该研究起源于自主开发的创新五自由度并联机器人平台,其核心在于构建一个高性能、精确的运动控制架构。
首先,文章阐述了并联机构的基本概念,强调了并联机构相较于串联机构的优势,如高速度、高精度以及刚度大,不易受到关节误差的影响。少自由度并联机器人因其成本效益和紧凑设计,在实际应用中具有广泛潜力,尤其在需要较少自由度就能满足需求的场景下。
研究的核心硬件包括微计算机作为控制核心,无刷直流电机作为动力源,以及PCI接口测控卡作为数据传输和控制接口。这些组件的选择体现了对高性能和稳定性的追求,同时考虑到系统的集成性和易于扩展性。
作者利用先进的ADAMS软件进行了机构的逆运动学分析,通过解决机构的位姿问题,为控制算法提供了精确的基础。C++语言被选作控制软件的开发语言,这表明作者重视代码的高效性和可维护性,确保了控制系统的实时性和准确性。
实验部分是研究的关键验证环节,通过实现并联机构的连续轨迹运动,实证了该系统在实际操作中的可行性和性能。实验结果的成功验证了新型五自由度并联机器人及其控制系统的设计是有效的,为后续的工程应用提供了坚实的基础。
本文深入探讨了基于BLDC的新型五自由度并联机器人在运动控制方面的创新,包括硬件选择、软件开发和实验验证,为并联机器人技术的发展尤其是在少自由度领域拓展了新的思路和方法。对于并联机构的研究者和工程师来说,这篇文章提供了宝贵的实践经验和理论支持。
基于基于BLDC的新型五自由度并联机器人运动控制的新型五自由度并联机器人运动控制
Motion control of novel five- DOF parallel robot based on BLDC
Abstr act:On the foundation of novel five - DOF parallel robot developed by University, thehardware of the
control system based on microcomputer、BLDC and PCI interface measure & control cardwas done. Inverse
kinematics solution of the machine solved by ADAMS, the control software of the robotsystem was written
using C++ language. Continuous track motion of the parallel robot was realized.Experiment result approved
the feasibility of the parallel Mechanism and the control system.
Key words: Par allel mechanism; BLDC;Motion control; Position analysis.
摘 要:在自主研制的新型五自由度并联机器人的基础上, 设计完成了以微机、无刷直流电机、PCI 接口测控卡为
基础的控制系统硬件部分, 应用ADAMS 软件求解了机构的位置反解曲线, 利用C++语言编写了机器人系统的控制
软件, 实现了并联机构连续轨迹运动。实验结果验证了本并联机构及其控制系统的可行性。
关键词: 并联机构; 无刷电机; 运动控制; 位置分析
1 引言
并联机构是由多个并行链构成的闭环机械系统。相对于串联机构, 由于它的驱动设备安装在固定地点, 位置而
不随末端执行点的运动而改变, 由此可带来高速、高精度的运动。并联机构具有刚度大、无关节误差积累和放
大、位置反解容易等优点, 与串联机构在应用上形成了互补关系。目前, 对并联机器人研究较多的是6 自由度(
6DOF) 并联机器人, 但在某些场合2~5 个自由度即可满足使用要求, 这类少于6 自由度的并联机器人被称为少
自由度并联机器人。少自由度并联机器人由于其驱动元件少、造价低、结构紧凑而有较高的实用价值。
在研发的5 自由度并联推拿机器人及其位置分析的基础上, 以微机、PCI 总线控制卡、PCI 总线数据采集卡
为硬件基础,利用VC++6.0 设计机器人控制界面, 实现该机构的连续轨迹运动。
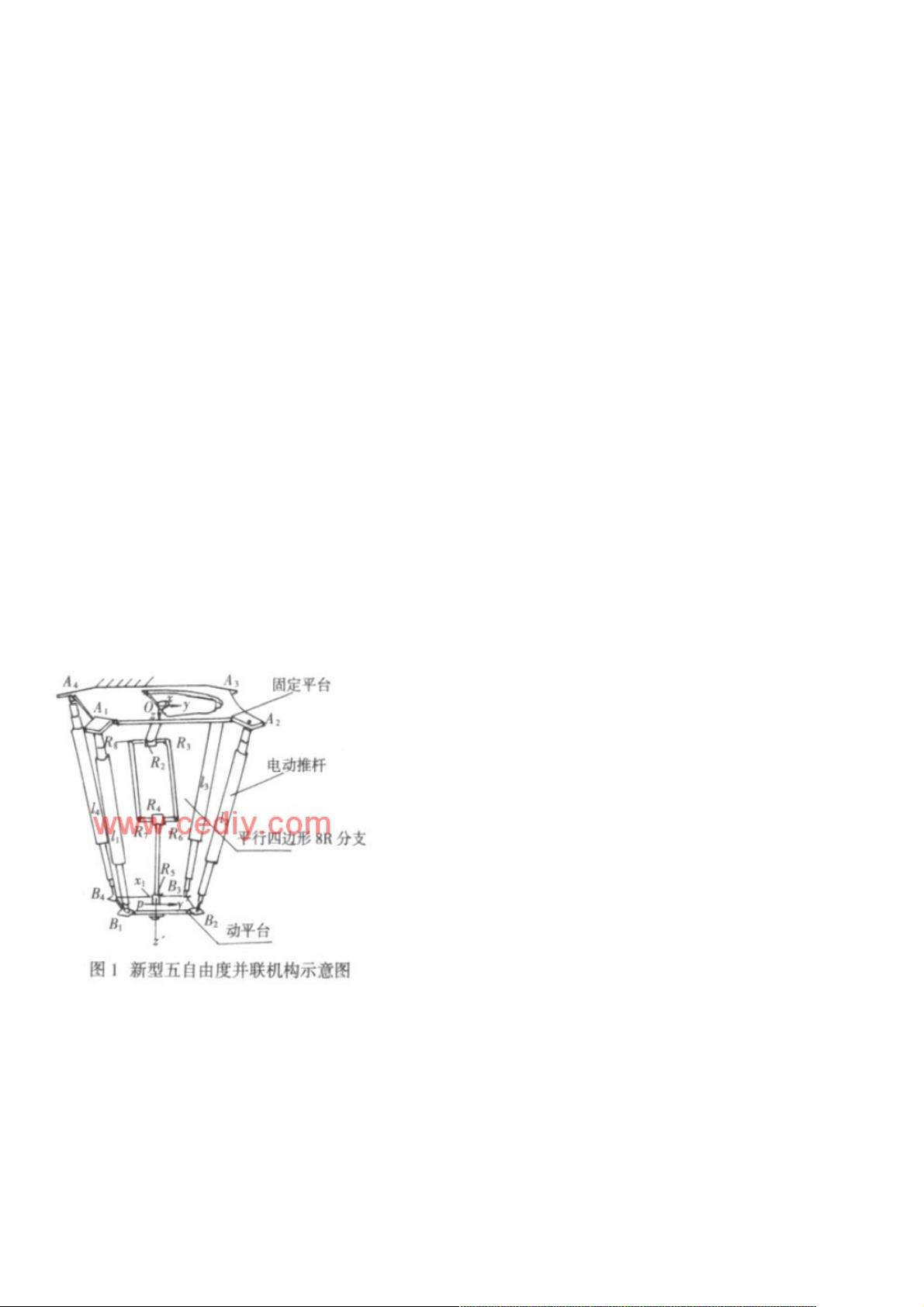
2 新型五自由度并联机器人机构原理
研究的并联机构如图1 所示。A1~A4、B1~B4 为球副, R1~R8 为转动副, L1~L4 为电动推杆, 实现伸缩运
动。A1A2A3A4 组成了静平台, B1B2B3B4 为动平台。
其中, 在机器人系统中, 四根电动推杆L1~L4 和中间的转动副( O) 为主动输入, 这样动平台相对于静平台
就有五个自由度,相应的控制量为: 位移量l1、l2、l3、l4 及转角。工作时控制驱动关节使工件在三维空间进行移
动或转动, 从而实现了动平台的运动。
3 控制系统的硬件组成
并联机构的控制系统组成如图2 所示, 该系统由微机、PCI总线测控卡、无刷直流电机及其驱动器、位移传感
器等组成。
下载后可阅读完整内容,剩余3页未读,立即下载
171 浏览量
2023-12-26 上传
171 浏览量
130 浏览量
142 浏览量
2023-10-30 上传
286 浏览量
119 浏览量
2024-06-18 上传

weixin_38663197
- 粉丝: 8
- 资源: 926
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易语言源码文件属性对话框模块源码.rar
- moneyConvert
- digipost-api-client-java-5.0.zip
- labview控制,如何给c语言源码做个界面,c语言
- 64个24px图标 .sketch素材下载
- sdl-helper-cpp:一种使SDL更轻松,更快速的方法
- 14.0(FromXcode_12_beta_3_xip).zip
- homebrew-redis-cli:通过homebrew安装redis-cli
- 安卓Android二次元社区论坛bbs绘画app可导入AndroidStudio
- Universal-CollapsingTabLayout,折叠带Tablayout的工具栏布局。.zip
- blekso.github.io:米哈伊尔·伊施特万(MihaelIštvan)
- Baekjoon-Algorithm:算法研究
- 易语言枚举注册表
- opengrok_tool.zip
- Cross-platform-programming-Lab1
- matlab代码sqrt-machine_learning_PCA:基于Matlab的PCA
