"特斯拉人形机器人感知硬件研究与量产加速"
版权申诉
134 浏览量
更新于2024-03-08
收藏 1.23MB DOCX 举报
人形机器人感知硬件专题研究:人形机器人的五类感官和硬件支撑
人形机器人的发展日新月异,感知能力对其发展变得日益重要。特斯拉机器人Optimus在短短8个月内就能够执行复杂动作,展现出了人形机器人迅速迭代的速度。2022年10月,在特斯拉AI Day上首次亮相的Optimus需要人工推出,只能完成简单的肢体动作,但到2023年3月的投资者日上已经展现了步行以及组装机器人的工作能力。再到2023年5月的股东大会上,Optimus已经可以实现对物品的抓取等复杂动作。特斯拉创始人马斯克提出,Optimus将面向特定应用场景进行快速迭代,并预计在特定场景下快速推出量产机型。特斯拉强大的汽车供应链有望加速Optimus的量产实现,并且在技术、成本和应用场景三个方面均有特有优势。
在技术方面,特斯拉拥有FSD自动驾驶技术以及DOJO D1超级计算芯片,正在进行底层研究,包括人形运动控制、硬件执行器、运动规划算法等。在成本方面,特斯拉强大的供应链及解决方案有望加速人形机器人量产进程。在应用场景方面,Optimus将面向特定场景进行快速推出量产机型。特斯拉在这三大瓶颈方面均有特有优势,因此有望加速人形机器人的商业化量产进程。
然而,人形机器人的感知能力,尤其是五类感官的硬件支撑,对于其发展至关重要。五类感官包括视觉、听觉、触觉、嗅觉和味觉,而这些感官的硬件支撑是人形机器人能够感知外界环境、进行自主决策和执行动作的关键。在本文中,我们将重点研究人形机器人的五类感官和相应的硬件支撑,以及这些感官对于人形机器人的发展所起到的重要作用。
首先,视觉感知是人形机器人最重要的感知能力之一。视觉传感器的硬件支撑包括摄像头、激光雷达等设备,这些设备可以帮助机器人感知周围的环境,识别物体、人和障碍物以及进行路线规划和导航。特斯拉在自动驾驶技术方面的积累将有助于人形机器人视觉感知能力的提升,并且特斯拉在自动驾驶领域的成功经验将对人形机器人的视觉硬件支撑产生积极影响。
其次,听觉感知是人形机器人的另一重要感知能力。听觉传感器和相应的硬件支撑可以帮助机器人听到环境中的声音、音乐、语音指令以及其他机器人或人类的交流。特斯拉的声音识别技术和音频处理经验将有助于人形机器人的听觉感知能力的提升,并且应用于特斯拉汽车中的音响系统、语音助手等硬件也可为人形机器人提供宝贵的参考。
另外,触觉感知对于人形机器人的发展也不可或缺。触觉传感器和相应的硬件支撑可以使人形机器人感知物体的形状、温度、纹理以及进行触摸、抓取等操作。特斯拉在汽车感应系统和自动充电设备等领域的经验将对人形机器人的触觉感知能力的提升产生重要影响,并且可以为人形机器人的硬件支撑提供丰富的经验和技术支持。
而嗅觉和味觉感知尽管对于人形机器人的发展影响较小,但在特定场景下仍具有重要作用。例如,在特定的工业场景中,机器人可能需要嗅觉和味觉感知能力来进行化学品、气味或食物的识别和处理。因此,嗅觉和味觉传感器的硬件支撑也将对人形机器人的发展产生一定的影响。
总的来说,人形机器人的感知硬件支撑对于其发展是至关重要的。特斯拉在自动驾驶技术和汽车智能化领域的成功经验将为人形机器人的感知硬件提供宝贵的支持和参考,并且有望加速人形机器人的商业化量产进程。在未来的发展中,人形机器人的感知硬件支撑将继续成为研究和关注的重点,也将是人形机器人进一步发展的关键所在。
语言方面,以 ChatGPT 为代表的大模型已具备协助机器人处理语言,从而可以高效 地对感知信息进行交
互,如人类通过自然语言对机器人进行调试。根据微软 Sai Vemprala 等最新的论文:“目前的机器人需
要专门的工程师不断编写新的代码来修正机器人的行为, 而我们使用 ChatGPT 的目标是让非技术用户
参与到修正过程中,通过高级语言命令与语 言模型交互,无缝部署各种平台和任务。” 如果付诸实践,AI
有望帮助编写新代码和规范 来纠正机器人的行为,因此允许了不懂技术的广大用户提供反馈,轻松地与机
器人互动, 直到用户对机器人的处理解决方案满意为止,再将这个代码部署到机器人上,一个调试就 结
束了。
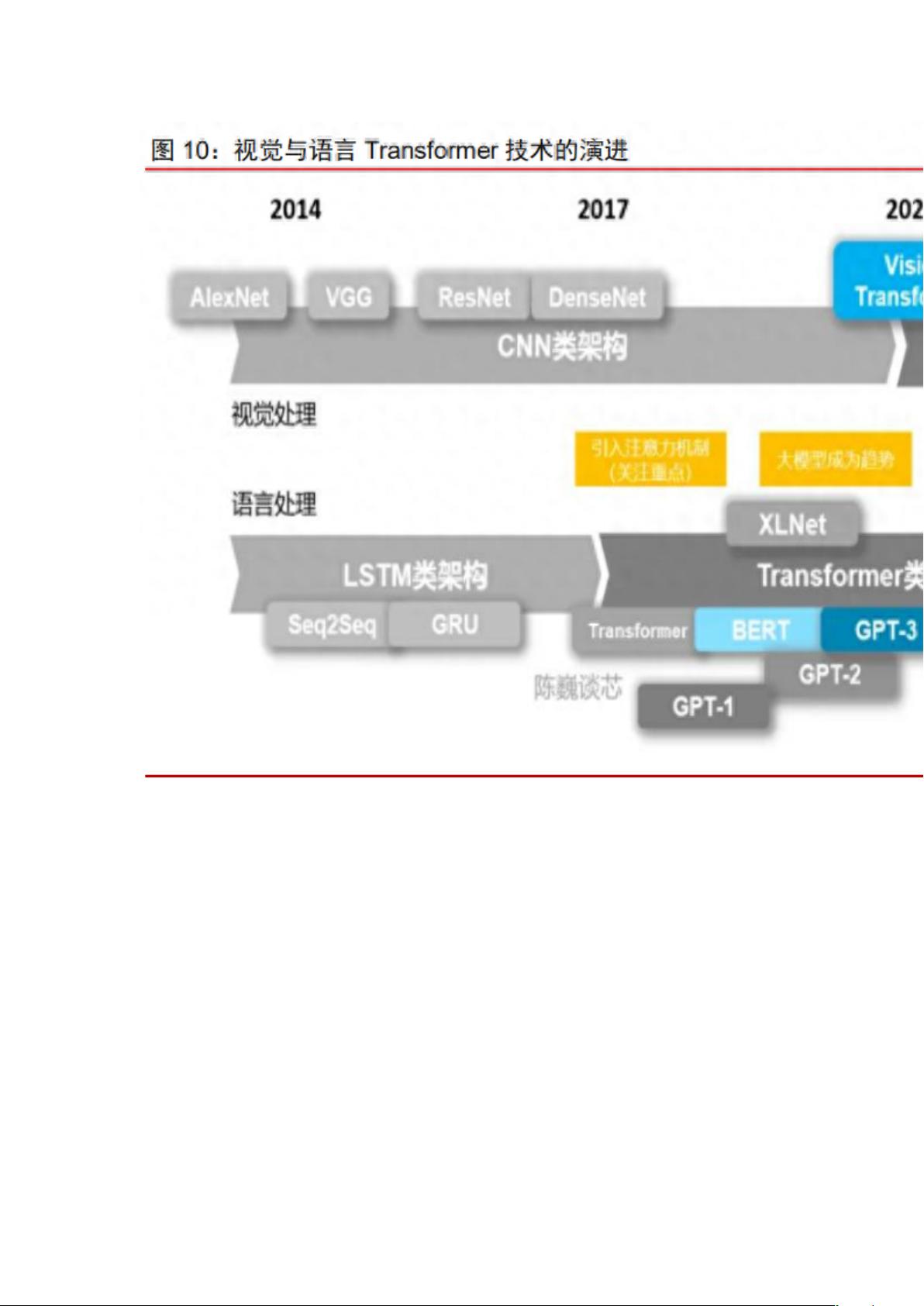
视觉方面,谷歌推出 ViT 统一了 CV 和 NLP 框架,用于图像识别。ViT 模型将语言模 型的 transformer
架构用于视觉模型,代替了传统的 CNN,统一了 CV 和 NLP 的架构。2020 年 10 月,谷歌推出 Vision
Transformer(ViT)模型,证明了不使用 CNN,直接将 Transformer 结构应用于视觉模型也可以很好
地执行图像分类任务。Transformer 将句子中的每个词 (token)并行输入编码器,ViT 直接将图像拆分
剩余18页未读,继续阅读
211 浏览量
2023-12-03 上传
2023-09-30 上传
2023-07-11 上传

产品经理自我修养
- 粉丝: 236
- 资源: 7718
 我的内容管理
展开
我的内容管理
展开







最新资源
- 软件水平考试网络工程师英语复习练习题10套
- JAVA面试题目大汇总
- 门禁系统设计 论文 完整版
- soa相关技术介绍与实现
- a Frame Layout Framework
- Thinking in Patterns
- 图书管理信息系统 SIM SQL Server2000数据库管理系统
- Bayesian and Markov chain
- Analysis of a Denial of Service Attack on TCP.
- 802.11英文原版协议 11G 11 N WEP WPA WPA2 BEACON 好东西大家分享
- aix双机配置详细配置
- 中国联通SGIP1.2
- 09数据库系统工程师考试大纲
- DFBlaser窄线宽激光器
- WinSock编程基础原理与C实现代码
- bfin-uclinux内核的CPLB v0.1
