超声波测距倒车雷达系统:STC89C52单片机实现
需积分: 10 48 浏览量
更新于2024-07-20
2
收藏 763KB DOCX 举报
"基于单片机的倒车雷达软件系统设计"
倒车雷达系统是一种用于辅助驾驶员在倒车时探测车辆周围障碍物的技术,尤其在视线受阻或存在盲区的情况下,它能提供准确的距离信息,减少交通事故的发生。本设计采用单片机作为核心控制器,结合超声波测距技术,构建了一个高效且可靠的倒车辅助系统。
超声波测距是一种常见的距离测量方法,其原理是利用超声波发射器发送短脉冲信号,然后通过接收反射回来的信号,根据时间差计算出目标距离。在这个系统中,选用STC89C52单片机作为主控单元,该单片机具有较低的成本、较高的性能和易于编程的特点。它通过控制超声波发射模块发出特定频率的超声波脉冲,然后开启中断系统进行精确计时。
当超声波回波被接收模块捕获后,单片机会对接收到的时间数据进行处理,通过已知的声速和时间差计算出车辆与障碍物之间的实际距离。这个过程通常涉及到复杂的算法,例如时间差的精确计算和误差校正等。计算结果会显示在1602 LCD显示屏上,直观地向驾驶员展示当前的倒车状态。
此外,系统还配备了警戒线功能,当检测到的距离小于预设的安全距离(警戒线)时,会触发报警机制。此时,LED指示灯会变红,蜂鸣器会发出声响,提醒驾驶员立即采取制动措施,避免碰撞。这种实时监测和预警系统极大地提升了倒车安全系数。
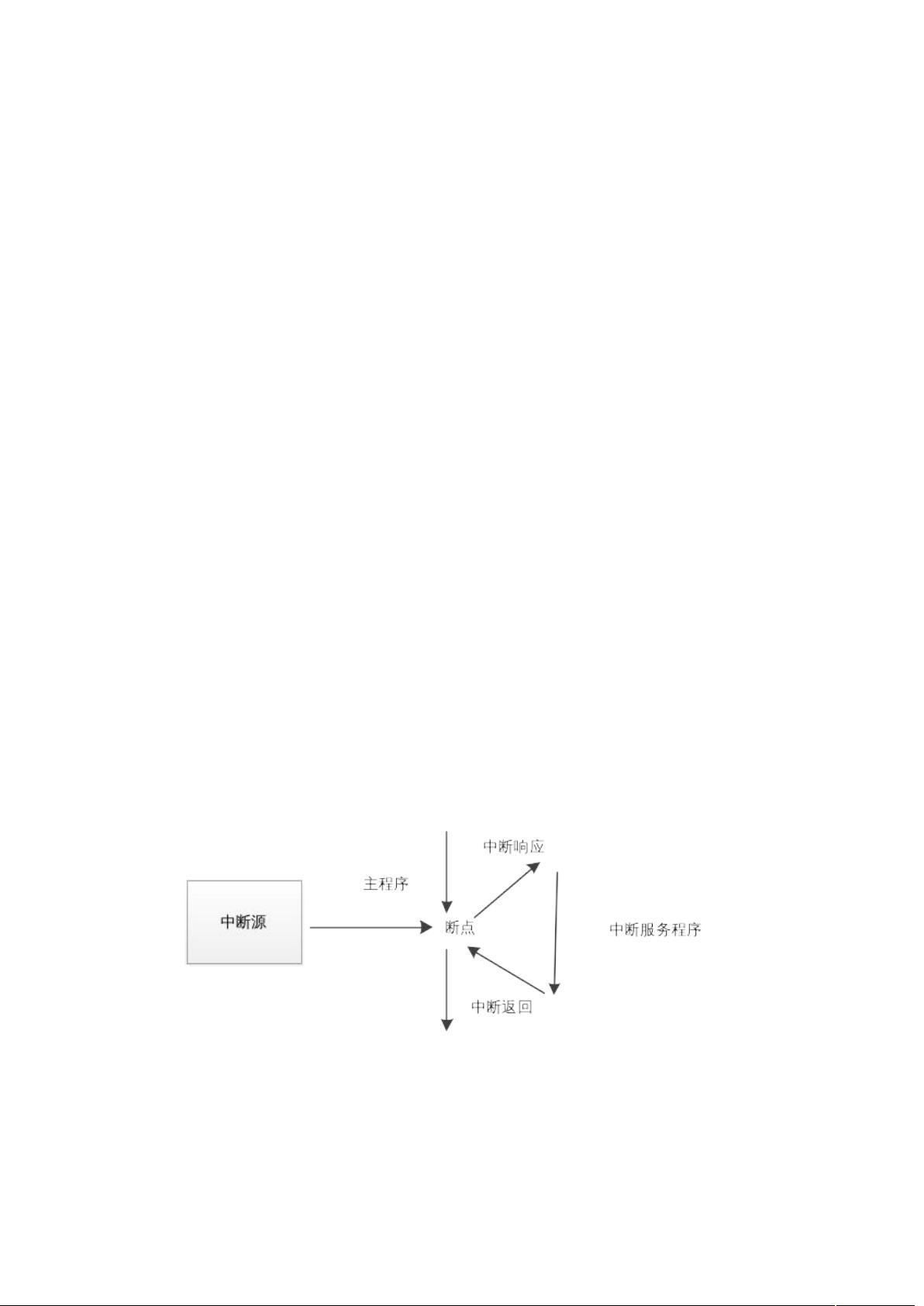
关键词涉及的“定时器”和“中断”是单片机处理超声波测距的关键技术。定时器用于计算超声波从发射到返回的时间,中断则确保在接收到回波信号时能够及时停止计时,从而提高测量的精度。同时,系统可能还集成了温度传感器如DS18B20,以补偿因环境温度变化导致的声速变化,确保在不同温度下测量的准确性。
基于单片机的倒车雷达系统利用了超声波测距技术,通过精确的软件设计和硬件配合,有效地解决了倒车过程中的盲区问题,提高了驾驶安全。这种系统不仅在日常驾驶中有着广泛的应用前景,也为智能交通系统的进一步发展提供了基础。
定时计数器的功能
定时/计数器 T0 和 T1 都具有定时和计数的功能。T0 和 T1 的工作方式是靠 TMOD 中的
控制位决定的。定时计数器的计数功能是当 中的控制位选定计数功能时,
计数的计数功能是依靠外部脉冲输入到单片机的相关引脚,在脉冲从高电平到
低电平的负跳沿计数器的值开始增 。由于要花费两个周期来确定一个计数,需要 24
个振荡器周期。定时功能: T0,T1 的定时功能也是通过计数实现的,与计数功能不同的是
定时功能的计数脉冲是来自于单片机的内部。
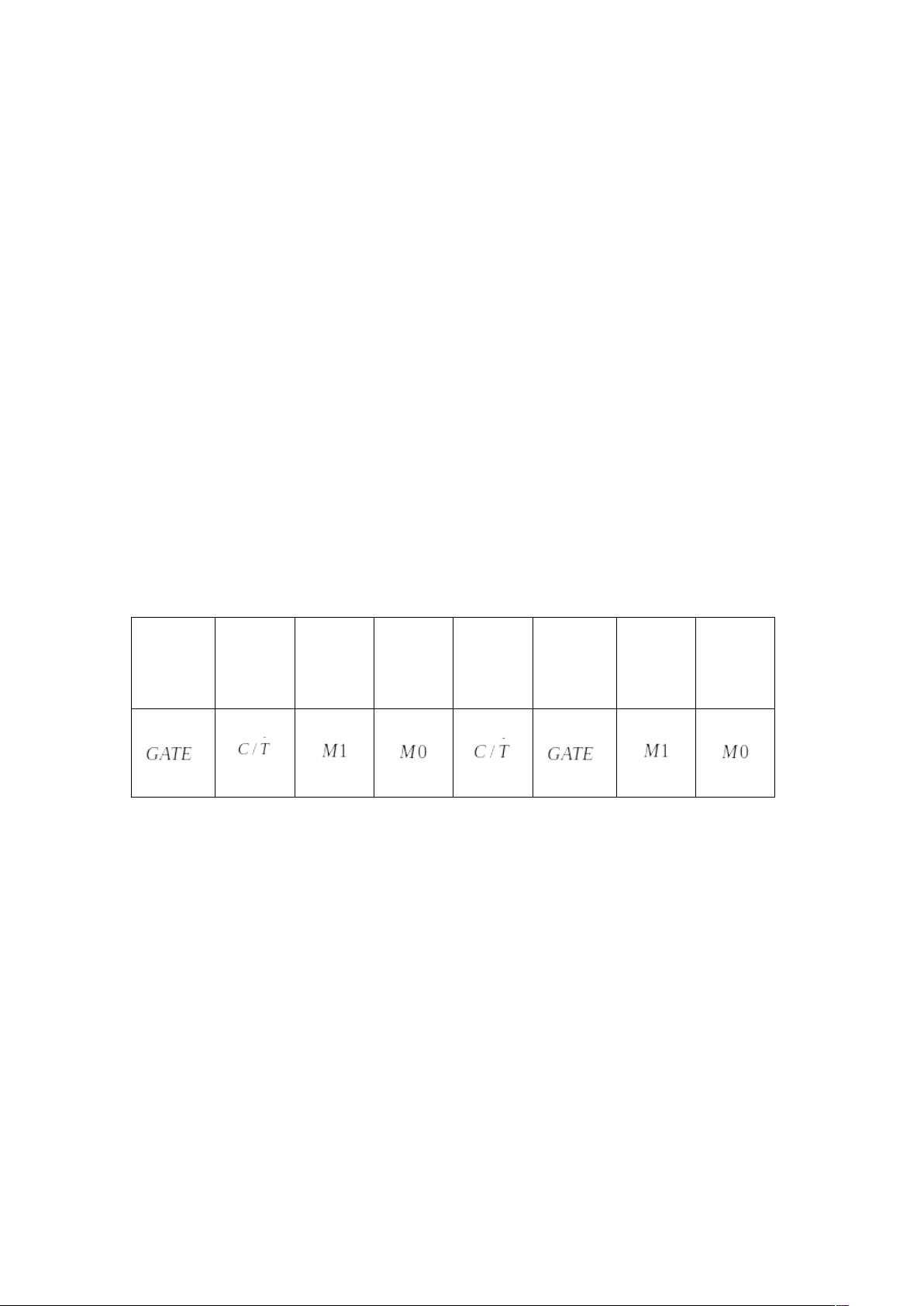
和 的控制寄存器
定时计数器 和 的方式控制器
TMOD.7 TMOD.6 TMOD.5 TMOD.4 TMOD.3 TMOD.2 TMOD.1 TMOD.0
图 5.2.2TMOD 用法图
定义 和 的工作方式和工作模式, 寄存器分为 部分,
低 位控制 ,高 位控制 。
门控制位
当 只要 ! 或者 ! 置 ,定时计数器才被选通,这时将不受外部
引脚控制。当 GATE=1 时,定时/计数器的运行受外部引脚输入电平的控制,当引脚为高
电平,并且 TR0 或者 TR1 置 1,定时/计数器才被选通;

剩余63页未读,继续阅读
2013-01-14 上传
2021-10-02 上传
2021-09-24 上传
2023-07-01 上传
2021-07-12 上传
2021-09-29 上传
2010-01-27 上传

qq_28611661
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
