ARM7嵌入式APT控制系统:高实时卫星通信终端解决方案
60 浏览量
更新于2024-09-03
收藏 312KB PDF 举报
本文主要探讨了基于ARM的空问光通信APT(Adaptive Position Tracking)控制系统的设计与实现。嵌入式系统因其高性能、低功耗和成本效益,在卫星通信终端等需要高实时性、高集成度、小型化和轻量化应用中的优势日益显著。文章的核心焦点是提出了一种以ARM7嵌入式处理器为核心的技术解决方案,该控制系统主要用于精确的运动控制和位置跟踪。
APT控制系统由四个关键模块组成:PWM脉冲控制和产生模块、RS232串行通信接口模块、光电编码接口模块以及人机交互模块。系统首先通过串行通信接收信标光图像处理部分提供的光斑坐标信息,然后通过位置跟踪算法计算出相应的电机控制信号,经PWM模块转化为脉冲信号驱动电机,确保转台能准确地指向目标位置。同时,光电编码器提供反馈,使得转台速度保持稳定,避免速度不稳定性对系统造成扰动。系统通过LCD显示运行状态、速度和位置等信息,用户可以通过键盘设置转台运行速度和扫描步长等参数。
硬件设计方面,文章重点介绍了采用的LPC2124 ARM芯片,这是一款专为工业控制设计的32位处理器,具有内置加密功能、大容量的Flash和SRAM存储空间,无需额外扩展,简化了系统设计。它集成了多种硬件组件,如UART、I2C、SPI、PWM、ADC、定时器和比较捕获单元等,能够满足APT控制系统所需的丰富功能。此外,LPC2124支持低功耗工作模式,使用3.3V和1.8V供电,配合高效的存储器接口和加速结构,能有效提高代码执行速度,同时通过16位Thumb模式减小代码大小,降低优化难度,适合于各种高效率的工业控制应用,如医疗系统和访问控制系统。
电源电路设计考虑到了芯片内核、外设和数字电路的不同电压需求,使用LDO稳压器 LM1117MPX分别提供3.3V和1.8V电压,确保了系统的稳定运行。整体而言,这篇文章深入剖析了基于ARM的APT控制系统的设计思路和技术细节,展示了其在现代通信技术中的实用价值和优势。
基于基于ARM的空问光通信的空问光通信APT控制系统设计控制系统设计
嵌入式系统具有高性能、低功耗、低成本的优点,使其在运动控制上的应用具有很大优势,以ARM嵌入式处理
器为基础的控制系统现在已经得到了广泛应用。针对目前卫星通信终端必须具有高实时性、高集成度、低功
耗、体积小和重量轻等一系列特点,提出一种基于ARM 7嵌入式处理器为核心的APT控制系统。
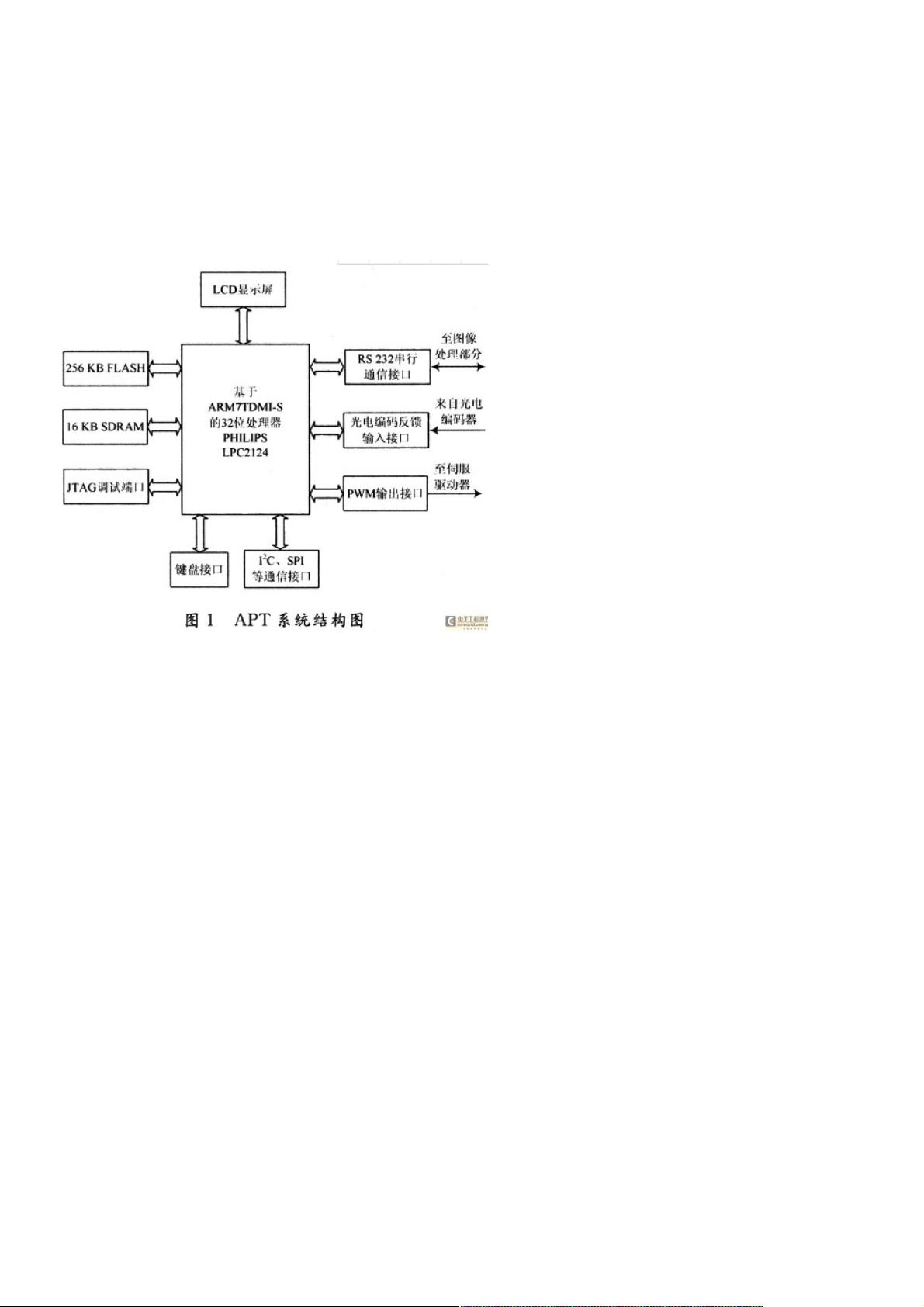
1 APT控制系统组成
APT控制系统由PWM脉冲控制和产生模块、RS 232串行通信接口模块、光电编码接口模块及人机交互模块组成,系统框图如
图1所示。
核心控制芯片选用Philips公司生产的专用工业控制ARM芯片LPC2124。先由串口接收到由信标光图像处理部分得到的光斑坐
标值,通过位置跟踪算法计算出输出,PWM的控制量值,再由PWM产生模块送出PWM脉冲到电机驱动器驱动电机,最终带
动转台指向目标位置。光电编码器反馈回电机的速度信息到处理器,运用相应的控制算法可以将转台的运行速度稳定在设定
值,防止电机因速度不稳定而扰动。在控制过程中,转台的运行状态、速度和位置等信息皆可由LCD显示,转台的运行速度、
扫描步长等由键盘输入设定。
2 硬件设计
2.1 LPC2124处理器简介
LPC2124是基于一个支持实时仿真和跟踪的32位ARM7TDMI-S CPU,是世界首款可加密的ARM芯片,并带有256 KWord嵌
入的高速FLASH存储器和16 KB的SRAM,完全能满足系统存储空间的要求,故不需要外加存储扩展,使系统更为简单、可
靠。内部具有UART,硬件I2C,SPI,PWM,ADC,定时器和比较捕获单元等众多应用部件,功能十分强大,远远能满足
APT控制系统的功能设计要求。3.3 V和1.8 V供电电压可使系统保持低功耗,128位宽度的存储器接口和独特的加速结构可
使32位代码在最大时钟速率下运行,提高了代码运行速度,独特的16位Thumb模式可使代码规模的降低超过30%,而系统的
性能损失却很小,提高了代码的运行效率,大大降低了程序的优化难度。特别适用于工业控制、医疗系统和访问控制系统。
2.2 电源电路
LPC2124的内核及片内外设供电电压为1.8 V,I/O口所需电压为3.3 V,而整个数字电路的供电电源为5 V,且通过78M05
将电源5 V稳压,故选用了LDO芯片LM1117MPX-3.3和LM1117MPX-1.8稳压输出3.3 V及1.8 V电压,其电路如图2所
示。
下载后可阅读完整内容,剩余3页未读,立即下载
2020-11-09 上传
2020-07-13 上传
2020-11-09 上传
点击了解资源详情
2020-10-20 上传
2021-09-21 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38631182
- 粉丝: 8
- 资源: 954
 我的内容管理
展开
我的内容管理
展开







最新资源
- 【2022更新,详细!】2001-2022上市公司分析师关注度数据合集!赠送权威参考文献!
- Chatting_Application
- 行业资料-电子功用-光能手机充电器的说明分析.rar
- platform-aceinna_imu:Aceinna导航工作室
- Fortran自由函数集合Fortran自由函数集合.zip
- node-os:NodeJS 核心模块
- reasoning-about-preferences:“智能代理系统偏好推理”的实现
- url-slug:少于1 KB且没有依赖项的Slug生成器,符合RFC 3986
- Python库 | google-auth-1.10.1.tar.gz
- gkt上板训练编译结果
- youth-lmi:针对发展中国家青年的劳动力市场指数。 该指数将10个指标分为三个维度
- 基于java-115_基于Android的智慧园区管理系统的设计与实现-源码.zip
- 行业资料-电子功用-光纤和同轴电缆一体的插头和插座的介绍分析.rar
- textile:纺织枢纽服务和水桶库
- 最喜欢和家人一起flash动画
- PHP实例开发源码—追梦FCMS迷你php相册系统.zip
