




KUKA CREAD_CWRITE:高级机器人编程与底层通信技术详解
版权申诉
本资源是KUKA内部的编程文档——CREAD_CWRITE,它专注于KUKA系统软件(包括8.2和8.3版本)的高级底层通讯编程。CREAD/CWRITE是一种关键工具,用于与库卡机器人进行高效交互,确保了数据传输的准确性和效率。该文档详细介绍了如何使用CREAD/CWRITE编程语言进行编程,并可能包含相关的语句和操作指南。
CREAD/CWRITE主要涉及到机器人的通信功能,它可能是基于KUKA System Software的通信协议,允许程序员编写程序来控制和监控机器人系统的各种操作,如运动控制、传感器读取、数据交换等。这对于自动化生产线中的集成和定制应用至关重要,因为它提供了直接与机器人控制器进行深度交互的接口。
对于VW System Software 8.2版本,CREAD/CWRITE的使用可能略有不同,但基本原则和结构类似。文档强调了未经KUKA Robot GmbH明确许可,不得擅自复制或向第三方透露这些内部资料的内容。用户在获得替换或维修服务时,可能会接触到文档中未描述的其他功能,但对此并不享有任何权利。
值得注意的是,尽管文档内容在发布时经过了与硬件和软件描述的一致性检查,但可能存在遗漏或不一致的地方,因为技术上的变动可能会影响实际操作。因此,KUKA Robot GmbH不能保证所有信息的完全符合性,会定期对文档进行更新和修正以保持其准确性。
在使用CREAD/CWRITE编程时,开发者需遵循最新的技术规格和说明,因为任何技术改动都可能影响程序的运行。同时,翻译版本的存在也表明这份文档可能是为了方便全球各地的工程师理解和使用,确保了跨语言环境下的沟通顺畅。
CREAD_CWRITE文档是KUKA机器人编程人员必备的参考资料,它涵盖了底层通讯编程的实战技巧和理论知识,对于提升编程效率和解决技术问题具有重要作用。然而,在实际操作过程中,使用者应时刻关注官方发布的最新版本和更新,以获取最精确的信息和最佳实践。
12 / 67 Issued: 17.02.2014 Version: KSS 8.2, 8.3 CREAD/CWRITE V1
CREAD/CWRITE
Overview
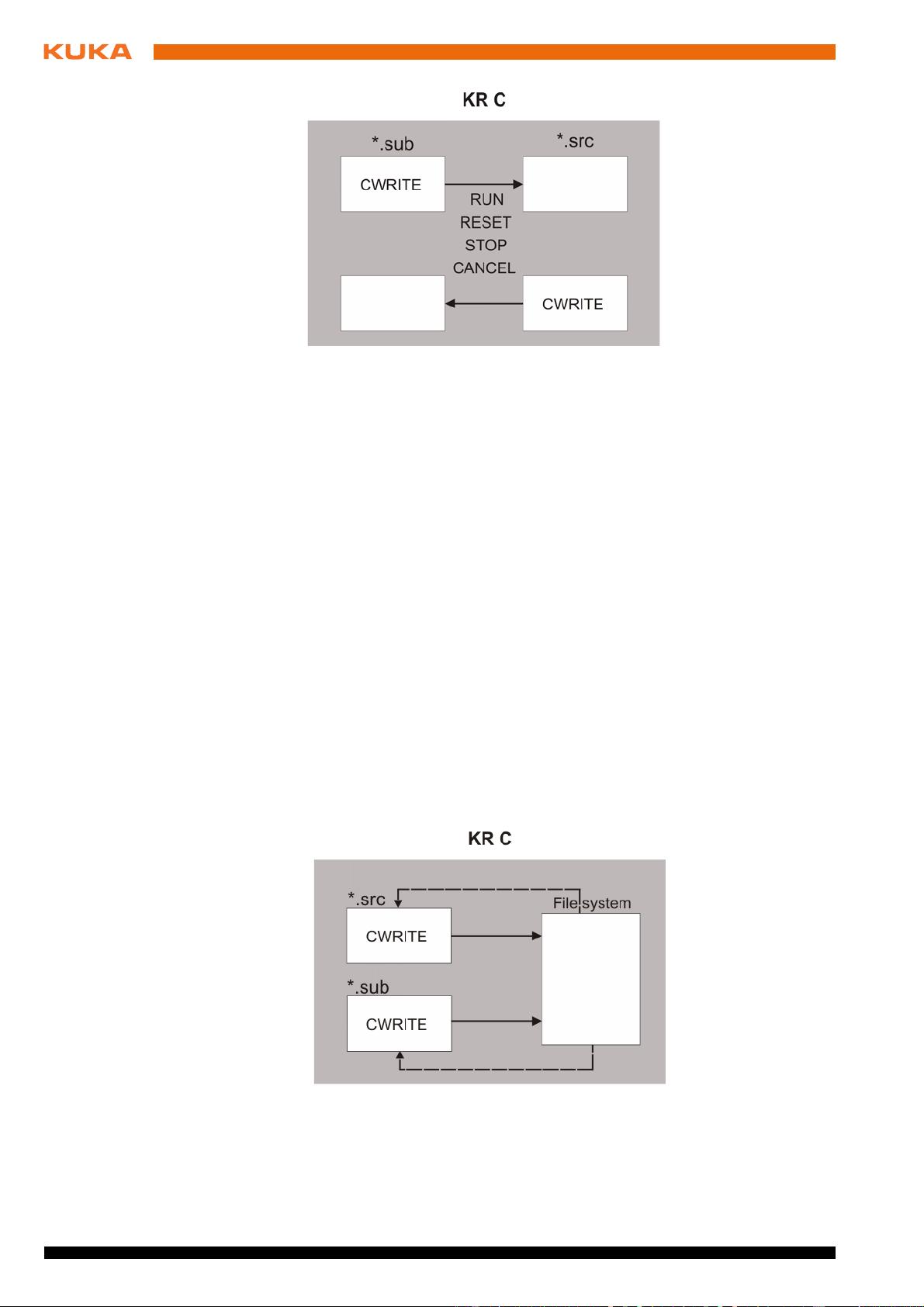
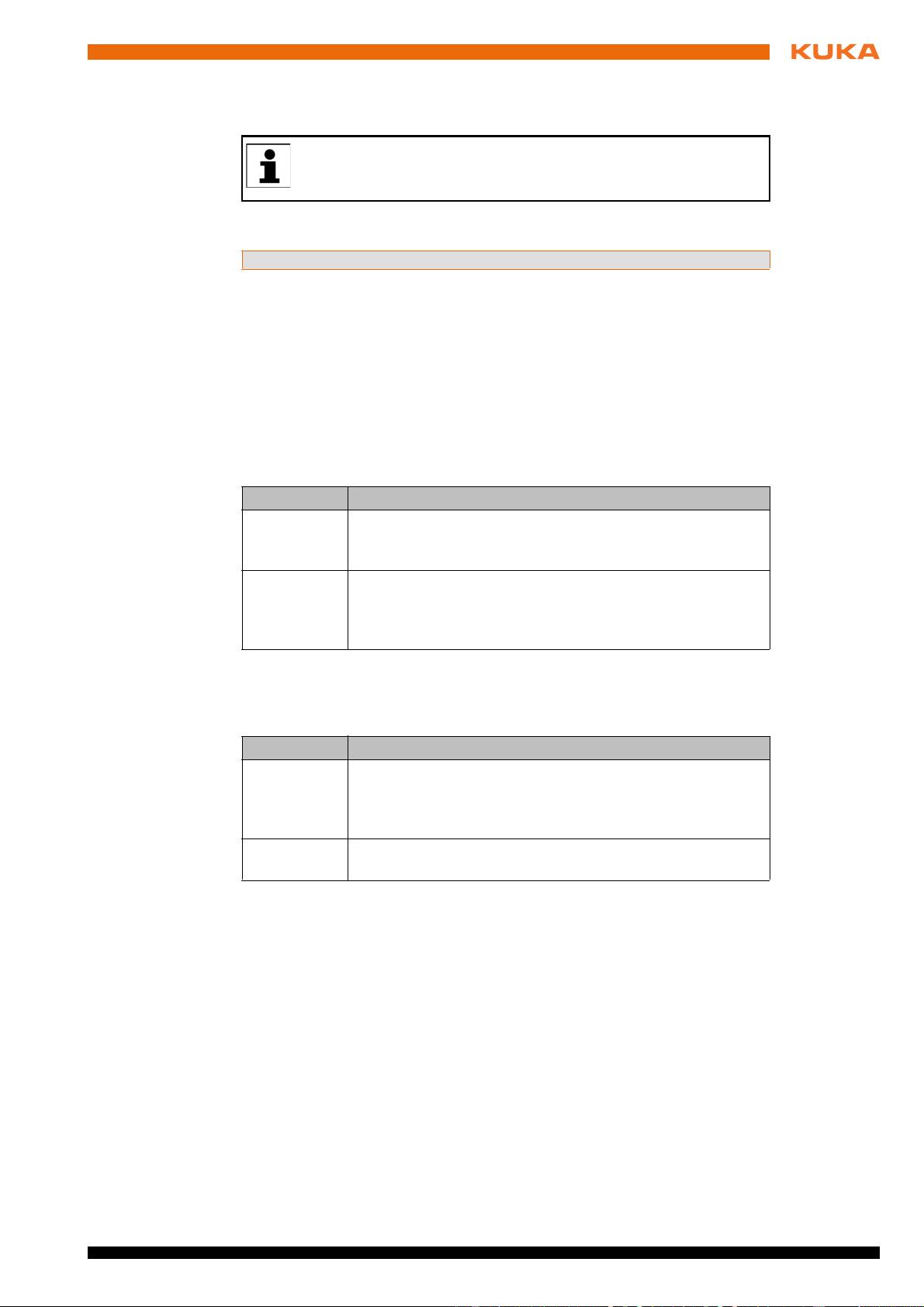
4.3 Communication via the command channel $FCT_CALL
Description CWRITE can be used to perform operations on the file system via the com-
mand channel. Example: Open a file via the command channel and write a
character or a character string into the file.
The file system functions can be called from a robot interpreter program or
from a submit interpreter program. It is not permissible to open a file from one
interpreter and then access it from the other interpreter, e.g. to write to it or to
close the file again.
When a file system function is called, a specific number of parameters are
transferred to this function. Each of these functions supplies a return value via
CWRITE. The return value indicates whether the function was executed suc-
cessfully or aborted with an error. In the case of an error, the returned error
number can be used to localize the cause.
(>>> 8.1 "Error writing to the command channel $FCT_CALL" Page 55)
CREAD is not relevant for the command channel.
Configuration The command channel does not need to be configured for communication with
CWRITE.
Overview
Fig. 4-2: Communication via the command channel $CMD
Fig. 4-3: Communication via the command channel $FCT_CALL

剩余66页未读,继续阅读
419 浏览量
251 浏览量
1425 浏览量
174 浏览量
232 浏览量
511 浏览量
146 浏览量

qq_30122111
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- vb.net与sql打造的图书管理系统开发指南
- Java编程实践: Tugas-10-PBO项目详解
- 安装TortoiseSVN并实现中文界面的快速指南
- 皮皮影视软件:轻松享受最新视频资源
- 软件开发者必备:精选桌面图片资源下载
- 深度解析FCN在TensorFlow1.4中的源码实现
- 探索Shecreature字体的设计魅力与应用
- 免费获取最新Android开发源代码和电子书
- Color-Assistant:一键创建个性化调色板应用
- 探索IEEE Latex模板及其文件结构
- 人民邮电C++程序设计教学课件精粹
- 群联PS2251系列量产教程与宇瞻4G/8G解决方案
- PyPI 官网发布新版本 aws-cdk.aws-events-1.95.0
- 初学者的电机控制入门:永磁同步电机基础解析
- Python实现图像的WebP编解码方法
- VB.NET实现学生成绩等级划分指南






















