气压传动搬运机械手与PLC控制系统设计
版权申诉
134 浏览量
更新于2024-06-21
收藏 710KB DOCX 举报
"搬运机械手及其控制系统的设计与实现"
在当今自动化生产环境中,搬运机械手扮演着至关重要的角色,尤其在制造业、物流业以及医疗救援等领域。这篇毕业设计说明书详细探讨了搬运机械手及其控制系统的开发过程,旨在解决执行机构和控制部分的关键问题。
机械手的发展近年来在我国取得了显著进步,它们能够模仿人类的肢体动作,执行各种任务,提高了生产效率和工作安全性。搬运机械手的广泛应用,如在生产线上的物料搬运、精密装配、危险环境作业等,使得对这类设备的需求日益增长。
本次设计的搬运机械手采用了气压传动作为执行机构,这是基于其结构简单、成本较低、维护方便的优点。气压传动通过压缩空气驱动气缸来产生动力,实现机械手的各个关节动作。设计时,需要计算气爪的夹紧力、伸缩臂气缸和摆动气缸的扭矩,以确保机械手在操作过程中有足够的力量和稳定性。选择合适的标准气缸是这一阶段的重要工作,它直接影响到机械手的性能和效率。
控制系统部分,设计者选择了可编程控制器(PLC)——三菱FX系列,作为搬运机械手的“大脑”。PLC能根据预设的逻辑控制气动系统的运行,实现精确、灵活的控制。设计中,需根据机械手的输入/输出(IO)点数来配置PLC,同时绘制气动原理图,以便清晰展示系统的运作流程。
程序设计方面,需要编写梯形图和程序语句表,这些是PLC编程的基础。梯形图是一种直观的编程语言,易于理解和实现,而程序语句表则提供了更精确的控制指令。这两者结合,确保了搬运机械手的动作能够按照预设的逻辑准确无误地执行。
关键词:搬运机械手、气压传动、可编程控制器、SMC气缸
此篇毕业设计说明书详尽地阐述了从概念设计到具体实施的全过程,包括机械手的选型、控制系统的选择和编程,为实际应用中的搬运机械手提供了理论基础和技术参考。通过这样的设计,不仅锻炼了学生的实践能力,也为实际生产中的自动化升级提供了有益的解决方案。
第二章 搬运机械手夹持部分计算
2.1 夹持式手部驱动力计算
任务书给出的工件的质量是 G=1 千克,尺寸等于
�
32
�
32(直径
�
高度),
材料是塑料。
1 根据夹持工件的质量 G 及方位计算手指能够把工件夹紧的夹紧力 N 粗略
为 N
�
(0.9~1.1)G
�
10N。
2 根据夹紧力 N 和所采用的传力机构,计算出理论的驱动力
p
'
。
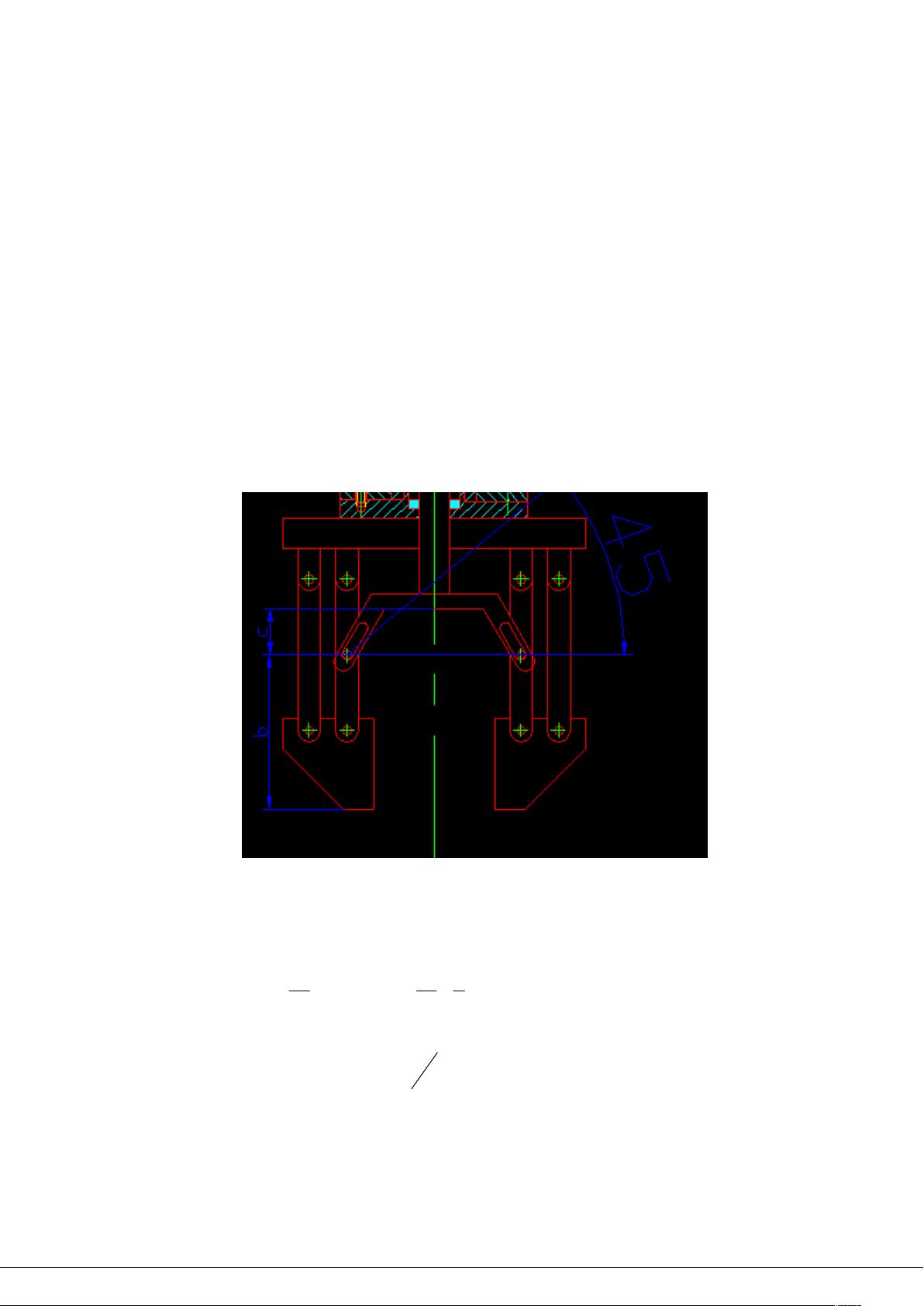
有上图可知 c=15mm b=40mm
45�
�
°
得
p
'
=
N
c
b
�2cos^
2
N=
10
2
1
15
80
��
=25N
3 计算出实际的驱动力 p
kk
Pp
21
*`*�
�
(千克)
p
'
——————理论驱动力
k
1
——————安全系数 ,一般情况下取 1.5 至 2

剩余54页未读,继续阅读
2022-07-11 上传
233 浏览量
2021-10-01 上传
2023-06-28 上传
2021-10-13 上传
2023-09-13 上传

南抖北快东卫
- 粉丝: 85
 我的内容管理
展开
我的内容管理
展开







最新资源
- PHP实现订单商品评价支持多图上传功能
- 赶集生活android客户端动画界面深度解析
- 供应链风险管理与应急运行策略培训教程
- 清新自然风绿色森林PPT模板免费下载
- EVC环境下基于TCP的16进制数据传输实践
- 20章CSS+Div布局教程实例,轻松学懂网页设计
- 掌握IPC扫描技巧:20cn扫描工具详解
- 掌握JavaScript实现水波纹效果的技巧
- Simscape液压起落架模型的开发与应用
- 猴年商务PPT模板:极简扁平化设计风格
- 经理人必备的演讲与口才训练教程
- 深入掌握Intouch基础与高级制作技巧培训
- Angle 3.8.8版本更新,Angular5及更多资源一键获取
- 流行JavaScript框架性能深度比较
- PHP仿淘宝商品多规格属性实现与数据库交互
- IOS风格绿色毛玻璃商务PPT模板下载
