基于贝叶斯压缩感知的超宽带室内多路径定位法
23 浏览量
更新于2024-08-27
收藏 151KB PDF 举报
"一种基于贝叶斯压缩感知的超宽带室内多径定位方法"
本文主要探讨了一种基于贝叶斯压缩感知(Bayesian Compressive Sensing, BCS)的超宽带(Ultra-Wideband, UWB)室内多径定位技术,旨在解决高采样率模数转换器(ADC)限制UWB定位精度的问题。在室内多径环境下,UWB信号的传播通道脉冲响应估计是定位的关键。该方法首先提出了一种新的通道脉冲响应精确估计方法,然后利用直接路径(Direct Path, DP)检测技术来估算到达时间(Time of Arrival, TOA),从而计算出传输延迟。最后,通过加权最小二乘(Weighted Least Squares, WLS)算法实现目标位置的定位。
传统的UWB定位算法通常需要较高的ADC采样率,这不仅增加了硬件成本,也对系统功耗造成压力。而本文提出的BCS方法则降低了对ADC采样率的需求,同时保证了定位精度。压缩感知(CS)理论在其中起到了关键作用,它能够在低采样率下捕获信号的主要信息,有效地减少了数据采集和处理的复杂度。
实验结果表明,与传统定位算法相比,该BCS方法不仅能提供相当甚至更高的定位精度,而且显著降低了ADC的采样率,这对UWB定位系统的实时性和能源效率具有显著优势。关键词包括:贝叶斯压缩感知、超宽带、室内定位、多径效应、直接路径检测、到达时间、传输延迟和加权最小二乘算法。
该研究为UWB室内定位提供了新的思路,通过引入贝叶斯压缩感知技术,实现了高精度与低采样率的平衡,对于未来智能物联网、智能家居、工业自动化等领域的室内定位应用具有重要的理论和实践价值。
A Method Of Indoor Multi-path IR-UWB
Localization Based On Bayesian Compressed Sensing
Wang Ping, Ruan Huailin, Fan Fuhua
Electronic Engineering Institute, Hefei, China, 230037
Email:wangping918304@163.com
Abstract—In order to solve the problem that high sampling rates
of ADC which limit ultra-wideband (UWB) localization accuracy,
a method of UWB localization based on Bayesian compressive
sensing (BCS) was proposed. In the indoor multi-path environ-
ment, the transmission channel impulse response is estimated
accurately using the proposed approach, then we adopt the
method of direct path (DP) detection to estimate the time of
arrival (TOA) which can be used to calculate the transmission
delay, finally, the target location can be located by the weighted
least square (WLS) algorithm. From the simulation results, we
find that the proposed method compared with the traditional
localization algorithm not only the localization accuracy is
guaranteed, but also the ADC sampling rate is reduced, at the
same time, it is advantageous that compressive sensing (CS)
method applied in the UWB localization system.
Keywords-Bayesian compressive sensing; channel estimation;
time of arrival; weighted least square; ultra-wideband localization
I. I
NTRODUCTION
In recent years, due to the navigation tracking, detection,
and other areas of the demand for precise localization, making
UWB localization once again becomes a hot topic of wide
public concern, and UWB localization research continues to
grow. In impulse radio UWB (IR-UWB) localization system,
not only in theory it is available to centimeter level or even
higher localization accuracy, but also the UWB localization has
the ability of the anti-multi-path and penetrating power.
However, the high precision localization relies on the detection
of UWB signal. Therefore, a high sampling rate ADC is
required.
Because of the high cost and large power consumption of
high sampling rate ADC, difficulties in the practical
application will limit the UWB localization accuracy. CS
theory [1,2] is a new kind of sparse signal acquisition and
reconstruction technology. The multi-path component of
UWB signal is sparse, then the channel is estimated based on
traditional CS theory [3], and the reconstructed signal is
detected by the RAKE receiver. In this paper, the BCS [4]
method we used has robustness to additive noise in the
sampling process, and we need not to estimate the sparsity. In
addition, the accumulated problem of localization error is a
key issue that must be solved. To improve localization
accuracy, the WLS
algorithm is also used, which the
accumulated impact of localization error can be reduced
effectively.
II. UWB
L
OCALIZATION
B
ASED
O
N
T
HE
TOA
R
ANGING
Because UWB signals has the high time resolution, higher
localization accuracy can be obtained by the method of TOA
[5]. In the indoor multi-path environment, essentially the
estimation transmission delay is the problem of UWB signal
multi-path components detection. DP is the first arrived
multi-path components and the energy is the strongest. As
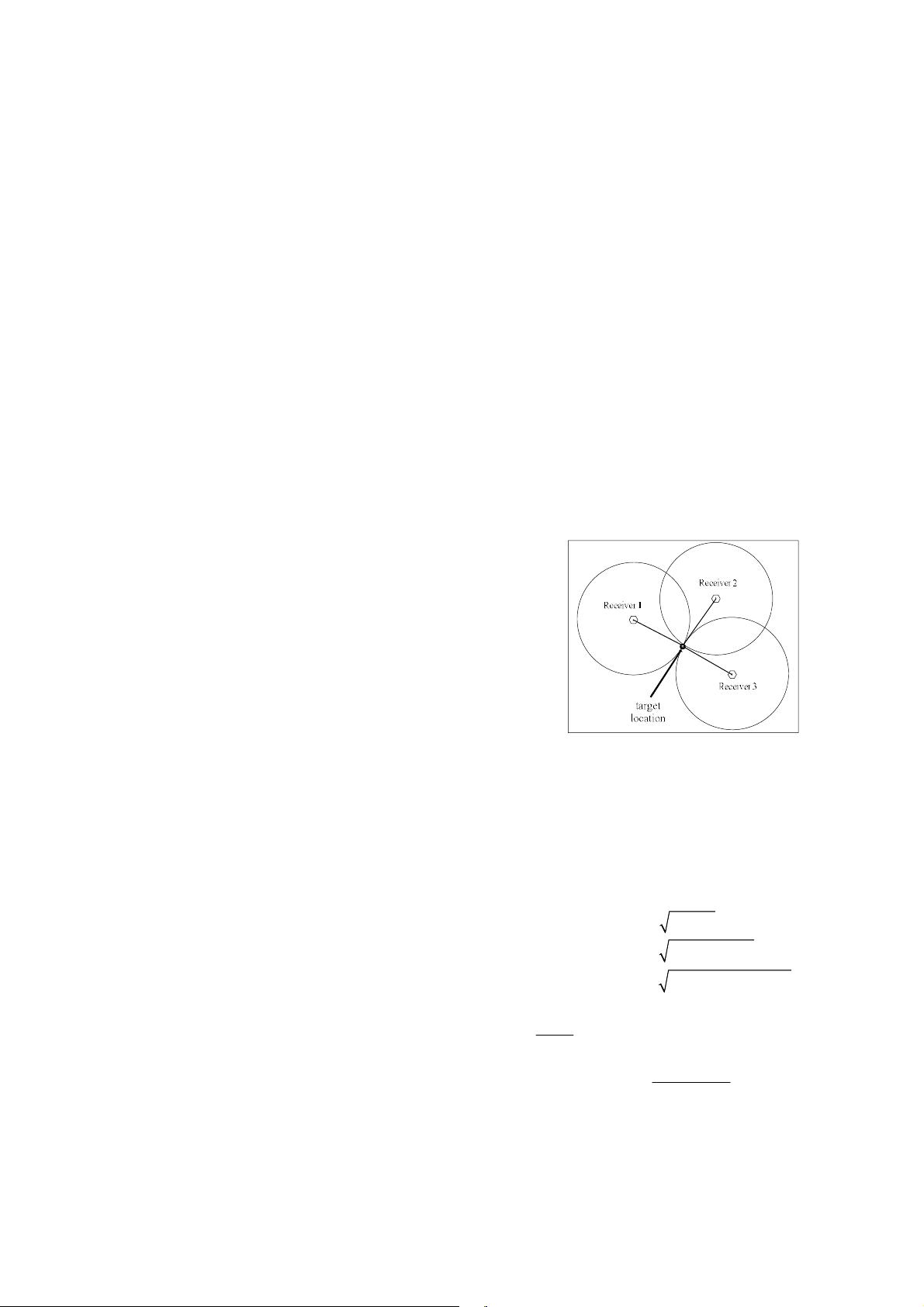
shown in figure 1, in the planar UWB localization, when the
target signal reaches more than three reference receiver, the
method of TOA estimation is detected by the arrived time of
DP. The estimation delay and the distance between the
transmitter and receiver can be known at the same time. Lastly
we take the reference receiver of a circle. Then the target
location can be measured by three circle intersection. The clock
synchronization between the transmitter and receiver, also at
least three receivers, is required in this approach.
11
dct
=
i
22
dct
=
i
33
dct
=
i
Figure 1.
UWB localization in the planar
In the ideal case, we ignore the measurement error. Three
receivers is formed by circle intersect at one point. Without
loss of generality, we assume the receiver locations as follows:
the receiver 1: (0, 0), receiver 2: (0,
2
y
), receiver 3: (
3
x
,
3
y
).
And the target location is (
x
,
y
). Respectively the estimation
of TOA is
1
ˆ
τ
,
2
ˆ
τ
,
3
ˆ
τ
, then the distance between the reference
receiver and the target transmitter can be expressed as:
22
11
ˆ
dc xy
τ
==+
i
(1)
22
22 2
ˆ
()
dc x yy
τ
==+−i (2)
22
33 3 3
ˆ
()( )
dc xx yy
τ
==−+−i (3)
From (1), (2), (3), we can obtain:
2222
231 32 233232
32
1
[( )( ) ]
2
x y y d yy dy dy xy
xy
= − − +−+
(4)
222
21 2
2
2
ydd
y
y
+−
=
(5)
___________________________________
978-1-4673-2197-6/12/$31.00 ©2012 IEEE
ICSP2012 Proceedings
下载后可阅读完整内容,剩余3页未读,立即下载
248 浏览量
2021-02-08 上传
2021-02-10 上传
130 浏览量
2021-02-11 上传
151 浏览量
2021-02-21 上传
156 浏览量
2022-07-14 上传

weixin_38724106
- 粉丝: 3
- 资源: 911
 我的内容管理
展开
我的内容管理
展开







最新资源
- Perl 二十四小时搞定
- 简明 Python 教程 《a byte of python》中译本
- 3G技术普及手册(华为内部版)
- 广告公司固定管理系统-需求分析
- 相当全面的J2EE面试题!!!
- rails_plugins_presentation.pdf
- SOA 案例研究:不同应用程序的集成组织
- ajax--dwr测试
- Servlet_JSP
- java struts 教程
- Struts 中文简介
- 五星_中兴《GSM移动通信基本知识》_
- 数据库第四版答案 大学教材课后答案
- 正则表达式30分钟入门教程
- 三级C语言上机南开100题(2009年终结修订word版).doc
- 基于IBM DS4500磁盘阵列的配置实验
