基于双向RNN的私家车轨迹精确重构与预测算法
版权申诉
13 浏览量
更新于2024-07-03
收藏 471KB DOCX 举报
本文主要探讨了在当前我国私家车数量激增的背景下,如何利用先进的信息技术解决车辆轨迹数据的精确获取和处理问题。随着GNSS和移动感知技术的发展,虽然车辆轨迹数据的采集变得可行,但实际操作中仍面临诸如低成本设备、GNSS定位信号中断及误差累积等问题。
首先,文章提出了一种创新的解决方案:开发了一种结合GNSS接收模块和车载诊断系统的GNSS-OBD设备,该设备不仅成本低,易于大规模部署,而且特别适用于私家车用户,实现了位置信息(通过GNSS获取)和运动状态信息(通过OBD读取器获取)的实时采集。
然而,为了应对GNSS信号中断和数据不完整性,文章的核心贡献是提出了一个名为Bi-RNN-NALU的双向加权轨迹重构算法。双向循环神经网络(RNN)在传统的单向模型基础上,引入了神经算术逻辑单元(NALU),这使得模型能够从前后两个方向对轨迹进行重构,增强了对复杂路段GNSS信号丢失情况的适应能力。这种融合策略有助于减少误差积累,提高轨迹数据的完整性和准确性。
通过这种方法,作者旨在构建一个在复杂城市环境下的智能定位与轨迹预测系统,能够在车辆行驶过程中实时处理和修正轨迹数据,为车联网、移动社交网络以及智慧城市等领域提供更精确的数据支持,从而优化城市交通管理,提升用户体验,同时也有助于环境监测和资源分配的科学决策。
这篇论文深入研究了深度学习技术,特别是RNN和NALU在车辆轨迹数据处理中的应用,为解决实际问题提供了新颖而有效的算法,具有很高的学术价值和实践意义。
新窗口打开|下载
CSV
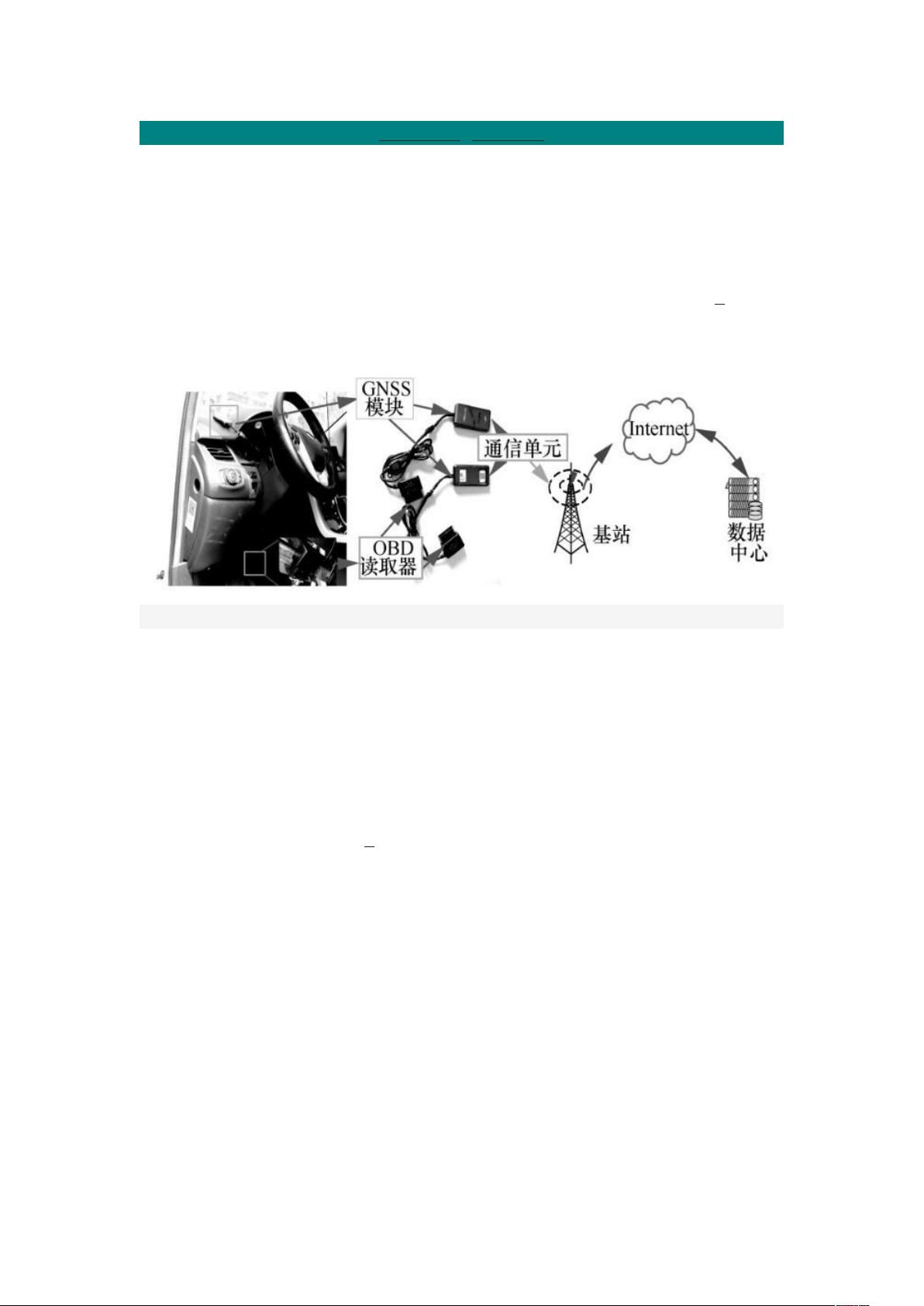
在车辆启动时, 设备开始收集轨迹数据。该设备除了能实时采
集车辆的轨迹数据,还能为车主提供车辆防盗追踪、电子围栏、行程管理和汽
车故障诊断等服务。因此基于该设备开展了实际场景中大规模轨迹数据的采集
工作。此外,本文车辆轨迹采集过程中的数据传输是完全匿名的,并不收集关
于车辆(车辆 0 已被匿名为字符串)及驾驶员的信息。所采集的数据存储在合
作的第三方服务提供商的服务器中,并受身份验证机制和防火墙的保护
。
图 1
图 1GNSS-OBD 轨迹采集设备
3问题描述
如前文所述,与轨迹相关的应用高度依赖数据的有效性及完整性。确保轨
迹数据完整性的主要挑战之一是城市中无法避免的 信号中断现象,这会
导致车辆位置数据的错误或丢失,降低轨迹数据的应用价值,该问题对于细粒
度的轨迹数据挖掘尤为严重
。为解决该问题,本文借鉴数据融合的思想,即利
用从 读取器获取的行驶状态,包括车速、行驶方向、加速度、角速度等,
在 信号中断时恢复轨迹的缺失数据。问题描述如下。
在 设备中,车辆位置和行驶状态分别通过 模块和
读取器获得。在时刻 ,令 st=(xt,yt)<74+表示车辆位置信息(经度和纬
度), aobdt"6ωobdt="6分别表示在 时刻 读取器读数中的加速度
和角速度。
已知 观测的车辆位置信息 S=[sT−N+1,⋯,sT,s˜T+1,⋯,s˜T+L,sT+L+1,
⋯]<>?@⋯>A>@⋯A>@(>@(@⋯=[(xT−N+1,yT−N+1),⋯,
剩余17页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-12-01 上传
2023-02-23 上传
2022-06-02 上传
2021-09-25 上传
2022-11-30 上传
2019-10-16 上传

罗伯特之技术屋
- 粉丝: 4501
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- python大数据等汇总.zip
- datastructures_algorithms
- Programs.rar_数学计算_C/C++_
- AlphaTrack PRO-开源
- canvas-sketch-render-service:基于HyperDrive的HyperSource服务,可将Canvas Sketch项目转换为生产包
- Magento-Import-Export:该脚本将导出和导入属性,集和产品
- 人工智能实验 个人作业.zip
- VedioSave.rar_视频捕捉/采集_Visual_C++_
- 5个电子字符
- Voldemort271.github.io:..
- 人工智能学习.zip
- cds-file-upload-frontend
- VB三角形动画窗体
- OpenCV.zip_Windows_CE_Visual_C++_
- parks_and_ride_project
- pythonTOexcel.zip
