基于RobotStudio的单传送带双层码垛系统仿真与实现
需积分: 0 17 浏览量
更新于2024-07-15
1
收藏 1.88MB DOCX 举报
本文主要探讨了基于RobotStudio的单传送带单一样式双层码垛系统的仿真实现,针对电气007班2019年的实验项目。在当前劳动力成本上升的背景下,工业机器人被看作提升企业自动化水平和竞争力的关键。文章重点介绍了自动化码垛系统的重要性,尤其是在减少占地面积、简化程序调整和降低能耗方面,机械式码垛机和人工搬运的局限性明显。
RobotStudio是ABB公司开发的一款离线仿真软件,它允许用户在无需中断实际生产的情况下,对机器人编程和系统配置进行预演和调试。文章详细介绍了RobotStudio的界面(如主界面、工程界面和功能界面),并列举了基础操作,如创建和编辑机器人程序、设置工作空间和运动路径等。
设计的核心是实现一个单样式的双层码垛系统,通过传送带输送物料,使用传感器检测物料到位,然后由机器人进行精准抓取和码放。设计要求包括传送带的设计,如货物的持续传输,以及抓取工具(吸盘)的设计,以确保物料能有效地被机器人拾取并放置在指定位置。因为采用了ABB的官方机器人模型,设计工作主要集中在自定义传送带和吸盘模型的构建上,这将有助于简化实际生产线的集成。
通过仿真,研究者验证了所设计的码垛系统结构稳定、运行可靠,能够满足生产效率和精度的要求。这表明RobotStudio在自动化生产线设计中的应用价值,不仅能够提升生产效率,还能减少错误和人工干预,降低生产成本。整个实验报告为工业机器人的自动化码垛作业提供了一种可行的解决方案,具有实际的工业应用前景。
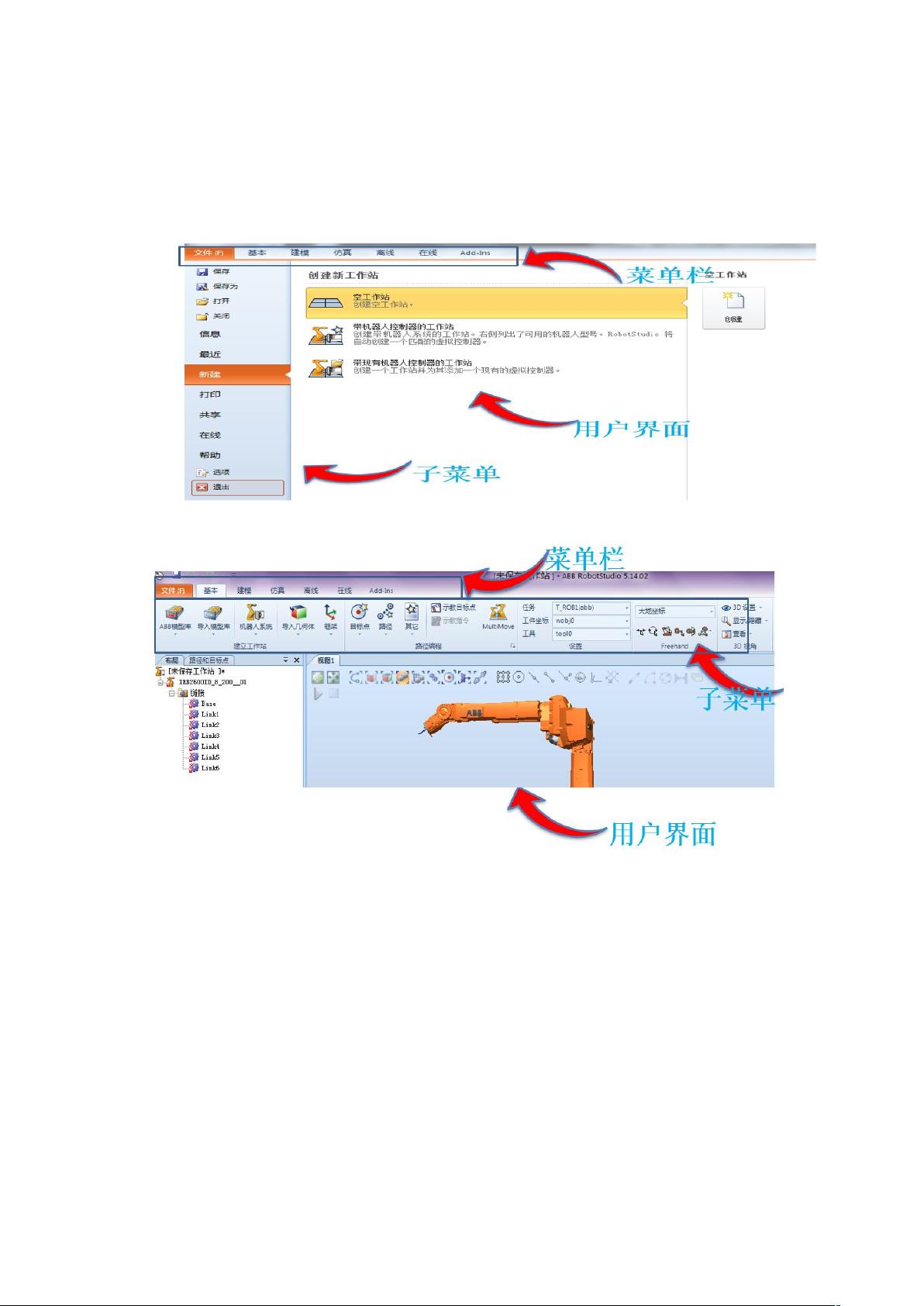
2.1 软件界面
图 2-1 RobotStudio 主界面
图 2-2 RobotStudio 工程界面
剩余18页未读,继续阅读
2023-04-16 上传
2021-08-14 上传
2021-08-12 上传
2022-12-19 上传
2020-05-08 上传

CCurtain
- 粉丝: 52
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- alkbot
- 飞翔的小鸟java源码-awesome-quora:Quora上有趣的问题/答案的集合
- SchoolAgent:既然如此就叫排课小帮手吧
- trailerplan-log-elk:带Python Django Rest API应用程序的trailerplan和将postrgresql记录到麋鹿堆栈
- ept_fota_robot
- izivan_flutter_test
- Clouderandroid:Cloudera安卓客户端
- tsetmc-daily-crawler
- CICD-integration
- wu-manber:Wu-Manber多字符串搜索算法的生锈实现
- Linked-lists
- 框内文字
- biglobby-master.7z
- groc
- 基于stm32步进电机T型加减速控制
- import-csv2:用于读取CSV文件的PowerShell模块
