"智能无线巡航小车:实时轨迹规划与控制"
版权申诉
195 浏览量
更新于2024-03-08
收藏 1.65MB PDF 举报
Abstract
This paper presents a design for an intelligent cruising robot based on wireless transmission. The design utilizes an effective trajectory generation algorithm for omnidirectional vehicles, using Bézier curves to plan a reference path while ensuring obstacle avoidance. The proposed algorithm efficiently solves the motion planning problem for the robot, allowing for real-time trajectory generation and control.
The primary focus of the design is to create a smart cruising robot capable of navigating various terrains and environments seamlessly. The use of wireless transmission enables the robot to receive real-time data and instructions, allowing for dynamic path adjustments based on changing conditions.
The trajectory generation algorithm ensures that the robot can avoid obstacles effectively while maintaining a smooth and efficient path. This feature is essential for the robot to navigate safely in crowded or unpredictable environments, improving its overall reliability and performance.
The design also includes mechanisms for real-time trajectory generation and control, allowing the robot to adapt quickly to new situations and unexpected obstacles. Through the use of advanced algorithms and technology, the robot can achieve precise movement and navigation, enhancing its overall autonomy and effectiveness.
In conclusion, the intelligent cruising robot design based on wireless transmission offers a robust and efficient solution for autonomous navigation in complex environments. By incorporating innovative trajectory generation algorithms and real-time control mechanisms, the robot can overcome obstacles and reach its destination with speed and accuracy. This design represents a significant advancement in the field of robotics and automation, with potential applications in various industries and fields.
Following equations describe boundary conditions:
0
v P
1
P
0
P
a 0 a
,
b
0
v
0
P
1
P
0
P
a a b
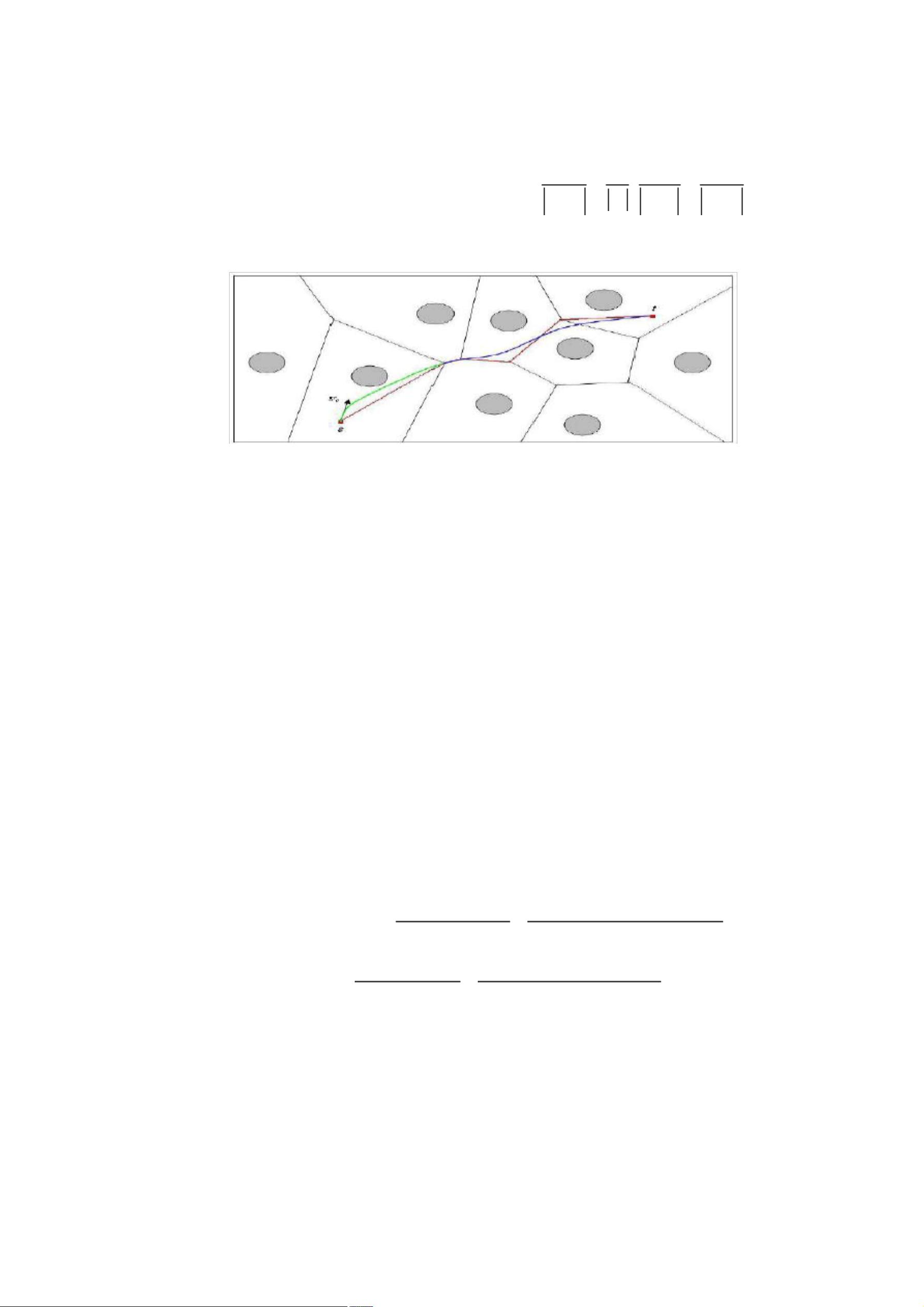
Fig. 2 shows an example of the paths.
(10)
Fig. 2. A smooth path resulted from two Bezier curves. The first Bezier curve is illustrated
in green and the second one is shown in blue [1].
Finally Sahraei assigned a velocity magnitude to each point on the generated curve
P
X
,Y
.to implement this, the paper tried to find a function
t
0, h,2h,
0,1
[0;1] such that X(a(t)) and Y(a(t)) satisfy the following dynamic
constraint
X X
Y Y
1,
(11)
2 2
where h 2 R+ is the sample time interval. Note that the variables X, Y, and t for (11)
are normalized values by (2). For the sake of optimality a(t) was calculated such that the left
side of the inequality constraint (11) approaches 1. To find ln , a(nh) for all n’s Sahraei used
derivative approximations to define the function f :
X
X
n2
X
X
n2
2X
n1
f
2
2h h
2
2
Y
Y
n2
Y
Y
n2
2Y
n1
1
2
2h h
(12)
ln is calculated by solving the equation
f
0
(13)
based on ln1 and ln2 by Newton’s method. e 2 R+ in (12) guarantees that the result of
Newton’s method makes the left side of inequality (11) less than but close to 1. Since ln relies
剩余27页未读,继续阅读
2020-10-16 上传
2019-09-14 上传
2021-07-12 上传
2022-03-01 上传
2022-06-30 上传
2021-10-19 上传
2023-05-05 上传
2021-09-25 上传

hhappy0123456789
- 粉丝: 74
- 资源: 5万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
