透视投影与三维重建:从世界坐标到相机坐标
需积分: 10 115 浏览量
更新于2024-07-06
收藏 4.18MB PDF 举报
"该资源为一个关于三维重建基础的PDF文档,主要涵盖了三维重建的基本概念、多视图几何以及摄像机模型的相关知识。"
在三维重建领域,理解从世界坐标到相机坐标的转换至关重要,这涉及到透视投影的过程。透视投影是通过模拟人眼观察物体的方式,将三维空间中的点映射到二维图像平面上。在SLAM(同时定位与建图)等技术中,这一转换被广泛应用于运动恢复结构的计算。
文档中提到了几个关键点:
1. **光圈与成像质量**:光圈大小直接影响照片的清晰度和亮度。光圈小会提高清晰度,但会使画面变暗,解决方法是添加透镜来调整光线。
2. **摄像机几何属性**:
- **偏置**:指像素坐标相对于理想位置的偏离。
- **单位变换**:涉及像素尺寸与真实世界的转换,如像素每米(pixel/m)和焦距(f)。
- **非方形像素**:不同方向上的像素尺寸可能不同,需要用alpha(fk)和beta(fl)来描述。
3. **齐次坐标**:在计算机图形学中,齐次坐标用于表示点和向量,便于进行线性变换。图像点和空间点的齐次坐标表示了它们在不同坐标系中的位置。
4. **摄像机的投影矩阵**:"M"矩阵描述了从空间点到图像点的映射,而"K"矩阵(摄像机内参矩阵)包含5个自由度,包括焦距、主点偏移等。如果摄像机存在偏斜,投影矩阵会更复杂。
5. **投影矩阵的自由度**:投影矩阵"M"由内参矩阵"K"(5个自由度)和旋转平移矩阵"[RT]"(6个自由度,旋转3个,平移3个)组成,总共有11个自由度。
6. **Faugeras定理**:明确了透视矩阵的充分必要条件,涉及矩阵"A"的行列式不等于0,确保了矩阵表示的是透视投影。
7. **投影变换性质**:点投影为点、线投影为线、近大远小、角度失真、平行线在图像中相交(影消点)等,这些都是透视投影的基本特性。
8. **其他摄像机模型**:弱透视投影适用于物体远小且深度差异大的场景,常用于图像识别;正交投影则用于建筑和工业设计,因为它能保持形状比例不变。
9. **摄像机标定**:是确定摄像机内外参数的过程,这对于从图像中精确重建三维结构极其重要。
通过这些基础知识的学习,我们可以更好地理解和应用三维重建技术,例如在机器人导航、虚拟现实、增强现实等领域。
摄像机标定
摄像机标定,即求解摄像机内外参数,⽬标:从⼀张或多张图像中估算出内外参数
为什么重要?
答:摄像机内,外参数描述了三维世界到⼆维像素的映射关系
更换符号 P = Pw;p = P'
单视图测量
需要先验信息,⽐如墙的垂直结构
2D变换:
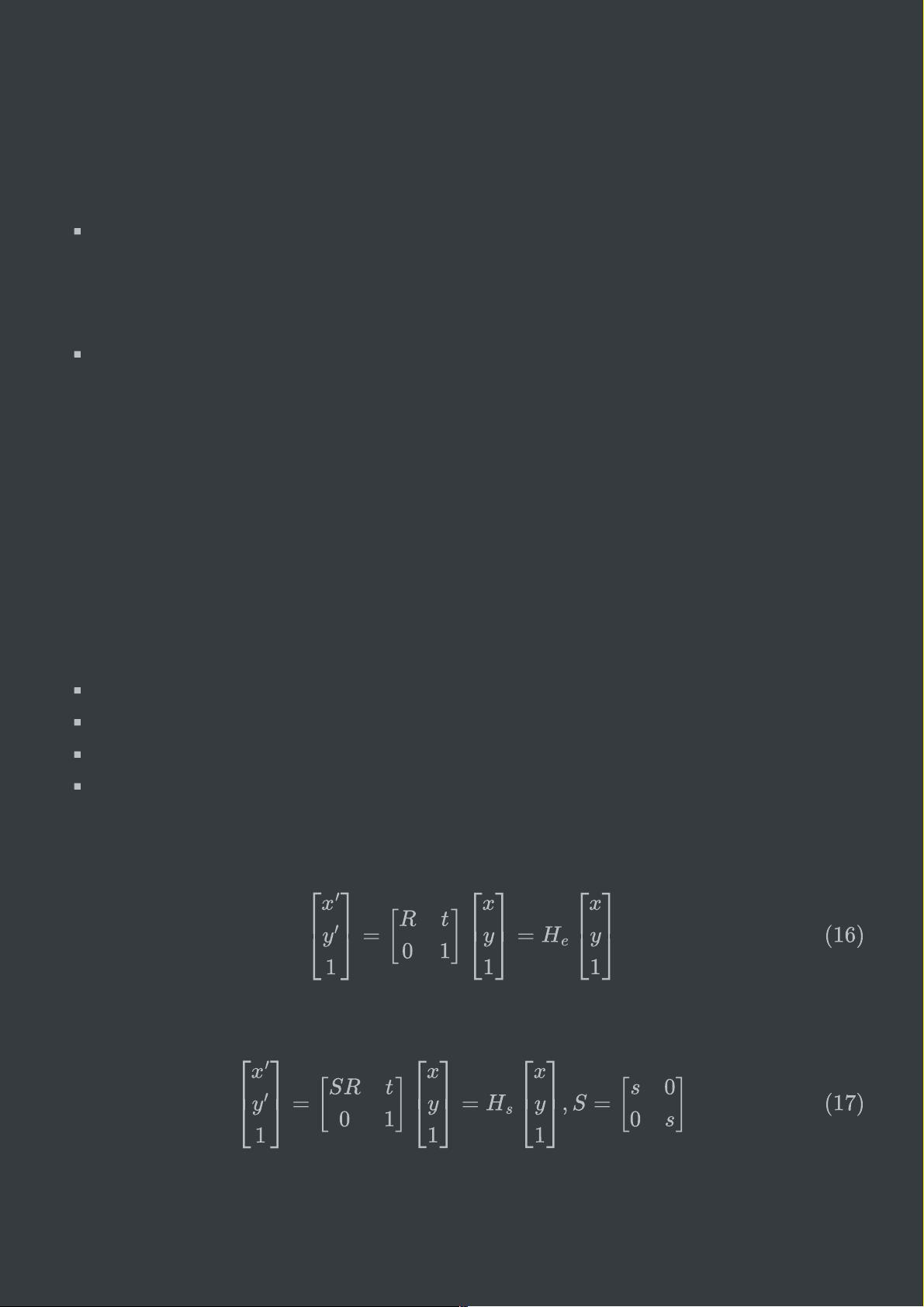
等距变换
相似变换
仿射变换
射影变换
等距变换:(保留⻓度⾯积不变,有3个⾃由度,刚性物体的运动)
相似变换:(不变量:1)-⻓度的⽐值;2)-⻆度。4个⾃由度)
仿射变换:(不变量:1平⾏线;2⾯积⽐值;3其他。6个⾃由度)
剩余29页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-09-22 上传
2021-11-29 上传
2021-08-15 上传
2019-10-20 上传
2021-10-10 上传
2021-08-26 上传









