六自由度机械臂在核电站检修中的应用与控制系统设计
需积分: 32 45 浏览量
更新于2024-07-22
5
收藏 2.95MB PDF 举报
"这篇硕士学位论文主要探讨了六自由度机械臂在蒸汽发生器检修中的应用,涉及机械臂的控制系统设计、硬件与软件实现,以及针对实际操作中遇到的问题提出解决方案。"
六自由度机械臂是一种高级的自动化设备,能够实现全方位的运动控制,包括前后移动、左右移动、上下移动以及三个旋转自由度,从而在空间中实现精确的位置和姿态调整。这种机械臂在特种作业,特别是核电站蒸汽发生器的维护中具有重要作用,能执行如涡流检查、超声检查、堵管处理和电视检查等任务,显著提升工作效率并改善工人工作环境。
本文基于国外蒸汽发生器检修机械臂的发展背景和控制系统技术现状,以美国ROSAI型机械臂为参考,设计了一套专用的控制系统。该系统的核心是数字信号处理器(DSP),它在伺服控制系统中起到关键作用,负责处理和解析来自传感器的数据,控制电机的运动。此外,论文还详细讨论了通讯电路和驱动电路的设计,确保机械臂各关节的协调运动。
在硬件设计基础上,软件设计同样重要。论文涵盖了控制算法的实现,包括角度合成、通信协议、安全保护措施和各种功能模块的编程。软件流程图展示了整个控制系统的运行逻辑。在实际调试过程中,作者针对出现的软硬件问题进行了详细分析,并提出了针对性的解决策略,以确保机械臂控制的稳定性和可靠性。
最后,论文提出了针对蒸汽发生器检修机械臂未来改进的方向,主要关注控制系统优化和稳定性提升,以应对更复杂的工作环境和任务需求。关键词包括蒸汽发生器、机械臂、伺服系统和控制算法,这些是理解本文核心内容的关键点。
总结来说,这篇论文深入研究了六自由度机械臂在核电站蒸汽发生器检修中的应用,涵盖了从系统设计到实施的全过程,为相关领域的研究和实践提供了宝贵的经验和理论基础。
哈尔滨工程大学硕士学位论文
第 2章 控制系统概述
2.1系统组成
二 : : 二
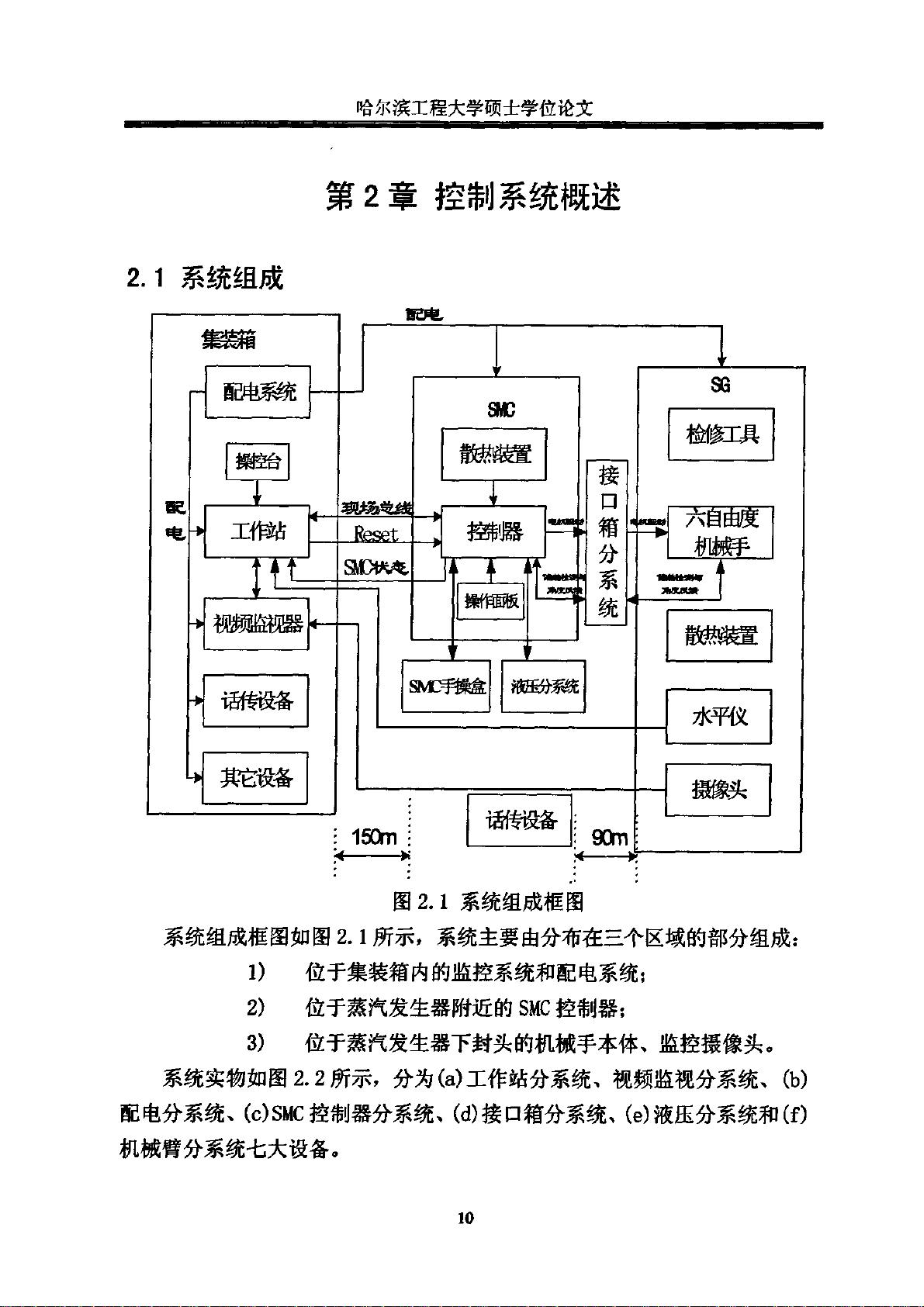
图2.1系统组成框图
系统组成框图如图2.1所示,系统主要由分布在三个区域的部分组成:
1) 位于集装箱内的监控系统和配电系统:
位于蒸汽发生器附近的SMc 控制器;
位于蒸汽发生器下封头的机械手本体、监控摄像头。
︑刀
产
︑.
了
0
‘
几
﹂
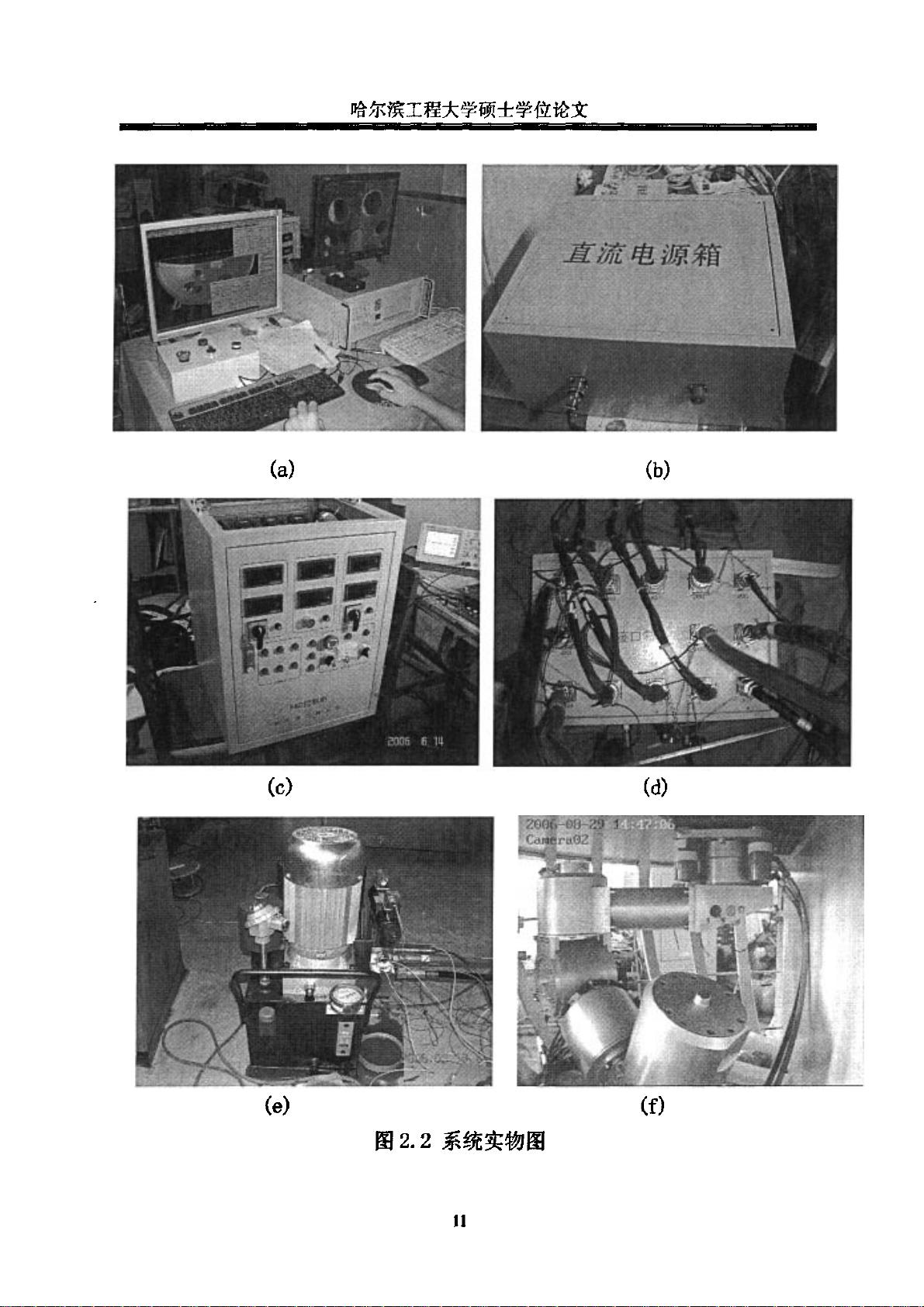
系统实物如图2.2所示,分为(a)工作站分系统、视频监视分系统、(b)
配电分系统、(c)s毗控制器分系统、(d)接口箱分系统、(e)液压分系统和(f)
机械臂分系统七大设备。
剩余76页未读,继续阅读
2018-06-04 上传
2023-06-13 上传
2021-09-29 上传
2022-05-02 上传
2022-07-12 上传
2022-07-12 上传
点击了解资源详情

baidu_26946685
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Elasticsearch核心改进:实现Translog与索引线程分离
- 分享个人Vim与Git配置文件管理经验
- 文本动画新体验:textillate插件功能介绍
- Python图像处理库Pillow 2.5.2版本发布
- DeepClassifier:简化文本分类任务的深度学习库
- Java领域恩舒技术深度解析
- 渲染jquery-mentions的markdown-it-jquery-mention插件
- CompbuildREDUX:探索Minecraft的现实主义纹理包
- Nest框架的入门教程与部署指南
- Slack黑暗主题脚本教程:简易安装指南
- JavaScript开发进阶:探索develop-it-master项目
- SafeStbImageSharp:提升安全性与代码重构的图像处理库
- Python图像处理库Pillow 2.5.0版本发布
- mytest仓库功能测试与HTML实践
- MATLAB与Python对比分析——cw-09-jareod源代码探究
- KeyGenerator工具:自动化部署节点密钥生成
