基于ARM2210的移动机器人友好人机界面设计
31 浏览量
更新于2024-09-01
收藏 122KB PDF 举报
本文主要探讨了基于ARM2210嵌入式系统的智能移动机器人的人机界面设计,强调了设计的简易性和低成本,旨在提升操作者与机器人的交互体验。
在现代科技的推动下,嵌入式系统已经成为日常生活中的重要组成部分,从MP3播放器到智能手机,它们无处不在。随着液晶显示技术和GUI技术的进步,人机界面变得更加直观和友好,尤其在移动机器人领域,良好的人机界面能帮助用户更好地理解和控制机器人的行为。
本文提出了一种基于LPC2210微处理器的方案,利用ZLG/GUI软件包来构建移动机器人的用户界面。LPC2210是一款由PHILIPS公司生产的基于ARM7TDMI-S架构的微控制器,拥有60MHz的最大工作频率,并集成了丰富的外设接口,增强了系统的稳定性和简化了开发流程。系统中还包括了RS232转换电路,用于与上位机PC104的数据交换,以及T6963C液晶控制器,支持液晶显示和LED数码管显示,还配备有16个按键输入,为设计高效的人机界面提供了便利条件。
在硬件设计部分,文章提到了PC104的串行口可以作为通信接口,通过UART0与上位机进行数据传输,其FIFO接收和发送缓冲区的特性提高了数据处理能力。接收器FIFO触发点的灵活性使得数据传输更加高效,适应不同应用场景的需求。
智能移动机器人系统包含了运动系统、电子信息系统和传感系统,利用CCD摄像机和超声波传感器来获取环境信息,实现避障功能。人机界面则主要展示机器人的运动状态,如速度、障碍物距离和行驶轨迹,使得操作者能够实时了解机器人的工作状况。
ARM2210的智能移动机器人人机界面设计充分利用了嵌入式系统的优点,实现了低成本、高效率的交互方式,提高了用户的操作体验,展示了嵌入式系统在机器人领域的广阔应用前景。通过这种设计,不仅能够简化系统的复杂性,还能增强系统的实用性,为未来的机器人技术发展提供了有益的参考。
ARM2210的智能移动机器人人机界面设计的智能移动机器人人机界面设计
随着嵌入式系统应用的飞速发展,人机交互系统的开发将更加广泛。本文阐述的基于ARM2210嵌入式系统的移动
机器人人机界面的设计方法,这种方法设计简单,成本低,使操作者与机器人的交互更加友好。
引言
嵌入式系统以其高性能、低功耗、低成本的优点,已经在很大程度上改变了人们的生活。如,MP3播放器、智能手机、数码相机
产品等已经渗入人们生活的各个方面。随着液晶显示技术的不断进步,以及图形用户界面GUI (Graphical User Interface)技术的
广泛应用,人机界面也越来越友好。它能为移动机器人的运动控制提供直观的路径图形、数据参数等。本文介绍了一种以嵌入
式微处理器LPC2210为基础,应用ZLG/GUI软件包设计移动机器人人机界面的方法。
我们设计开发的智能移动机器人是一个以PC104嵌入式微机为中心处理器, TMS320F2812为运动控制器,超声波传感器作为避
障的集合环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统,主要包括运动系统、电子信息系统和传
感系统。它通过CCD摄像机和图像采集卡获得视频信息,并通过超声波传感器组测得前方障碍物距离实现避障。移动机器人的
人机界面主要向用户展示移动机器人的运动信息,如当前的运动速度、与前方障碍物的距离以及行驶的轨迹。
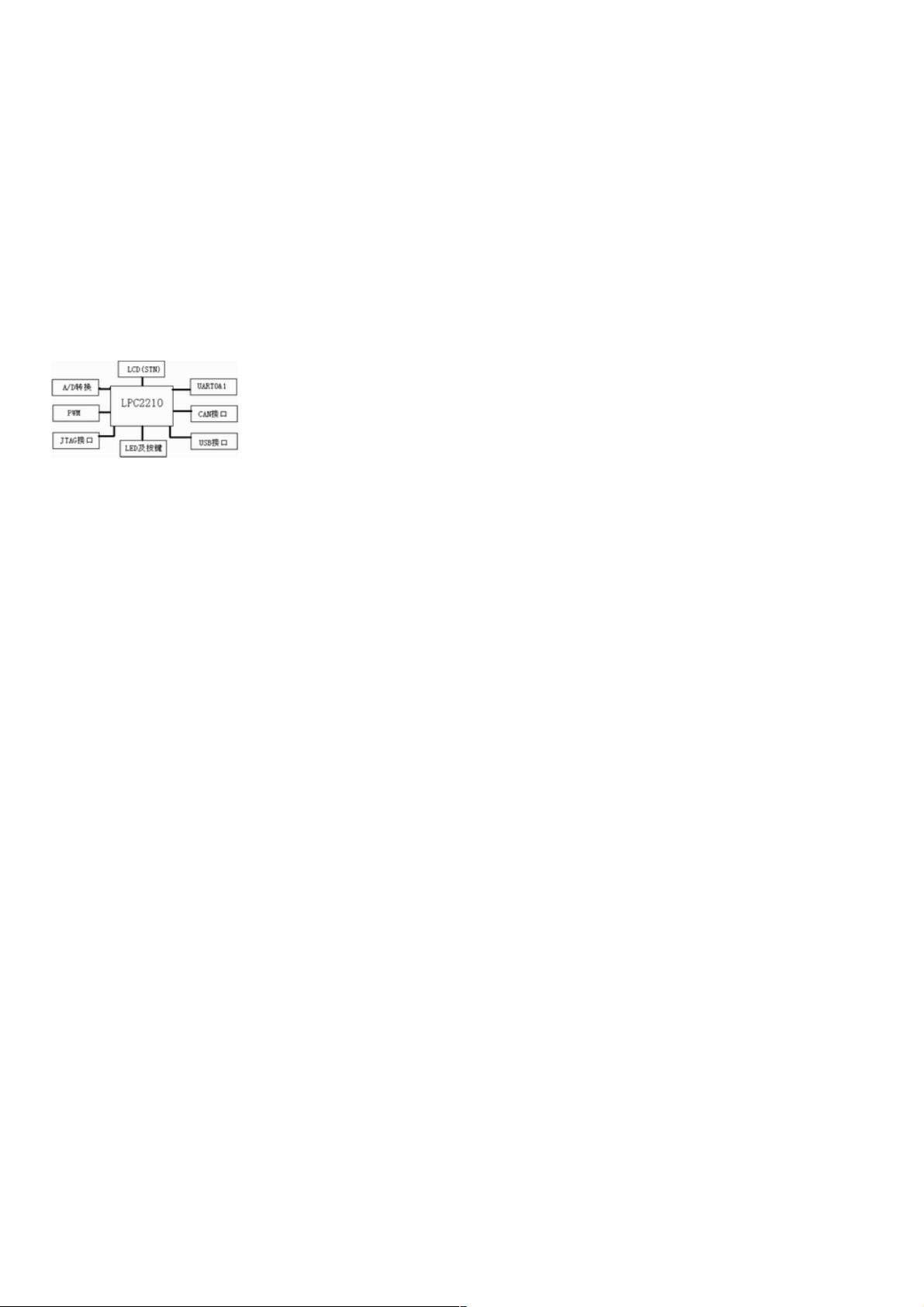
图1 ARM2210的系统框图
ARM221O的基本组成
ARM221O以PHILIPS公司ARM7TDMI-S微控制器LPC2210为核心,以支持实时仿真和嵌入式跟踪的嵌入式系统。LPC2210的
CPU频率最大为60MHz,并且扩展了丰富的外围设备接口,使系统稳定性大大提高,开发也更简单。图1是ARM2210的系统框
图。
由于该系统包含了RS232转换电路,可通过UART0与上位机PC104进行数据传输,同时还包括东芝公司的点阵式液晶控制器
T6963C,扩展了液晶接口,同时提供了LED数码管显示和16个按键输入,因此开发人机界面非常方便。
人机界面的硬件设计
数据传输
PC104的串行口可以作为标准PC的COMl通信口或扩展为控制台串行口,用于键盘输入和显示终端输出或计算机之间的串行输
入/输出口。
ARM2210的UART0具有16字节接收和发送FIFO;寄存器位置符合''550工业标准;接收器FIFO触发点可为1, 4, 8和14字节 ;内置
波特率发生器 。
移动机器人的运动信息通过TI公司DSP控制器TMS320F2812以及超声波传感器等传送至嵌入式微机PC104,再经过PC104作信
息融合后,通过串口传给ARM2210并由液晶屏显示。
液晶显示及菜单选择
东芝公司的液晶控制器T6963C具有独特的硬件初始化设置功能,最大驱动点阵液晶为单色640*128(单屏),支持图形和文本单独
显示和混合显示,并具有字符发生器,能满足对移动机器人人机界面的显示要求。图2为内置T6963C的240*128点阵图形液晶模
块原理图。
另外, ARM2210系统中配备了I2C器件ZLG7290以及16个按键。ZLG7290提供了I2C串行接口和按键中断信号,方便与处理器连
接;并且能驱动8位共阴数码管或64只独立的LED和64个按键,8个功能键可检测任一键的连击次数。
本系统选用点像素为240*128点、黄绿显示的STN液晶屏YL240128A作为人机界面显示屏;用ARM2210系统16个按键中的
S11、S12、S13作为输入部分,实现对人机界面的选择操作。
人机界面的软件设计
移动机器人人机界面的关键是菜单操作,以及图形和数据的实时显示。GUI是用于提高人机交互友好性、易操作性的计算机程
序,它是建立在计算机图形学基础上的产物。人们不再需要死记硬背大量的命令,而是通过窗口、菜单方便地进行操作。由于嵌
入式系统的资源有限,所以对GUI 的要求是可裁剪的,高速度的。ZLG/GUI 是由周立功公司开发的,占用资源小、使用方便的嵌入
式系统简易的图形用户界面软件。ZLG/GUI 提供了最基本的画点、线、圆形、圆弧、椭圆形、矩形、正方形、填充等功能,较
高级的接口功能有ASCII 显示、汉字显示、图标显示、窗口、菜单等,支持单色、灰度、伪彩、真彩等图形显示设备。因此,利
用ZLG/GUI软件包能够满足对移动机器人人机界面的设计要求。
下载后可阅读完整内容,剩余3页未读,立即下载
2011-07-22 上传
147 浏览量
2020-11-30 上传
269 浏览量
161 浏览量
284 浏览量
2024-11-10 上传
232 浏览量
2024-11-09 上传

weixin_38747087
- 粉丝: 77
- 资源: 1267
 我的内容管理
展开
我的内容管理
展开







