uCOS在LPC1768开发板上的移植指南
需积分: 9 191 浏览量
更新于2024-09-07
收藏 609KB DOCX 举报
"该文档是关于将嵌入式实时操作系统(uCOS)移植到宝马LPC1768微控制器开发板的详细指南。"
在嵌入式系统开发中,选择合适的实时操作系统(RTOS)是至关重要的。uCOS是一款广泛应用的轻量级RTOS,它以其高效、稳定和可移植性而闻名。本移植手册详细介绍了如何将uCOS II移植到基于NXP LPC1768微控制器的宝马开发板上。
首先,你需要硬件平台——宝马LPC1768开发板,这是一个基于ARM Cortex-M3内核的微控制器,广泛用于各种嵌入式应用。LPC1768提供了丰富的外设接口,适合进行RTOS的实践和演示。
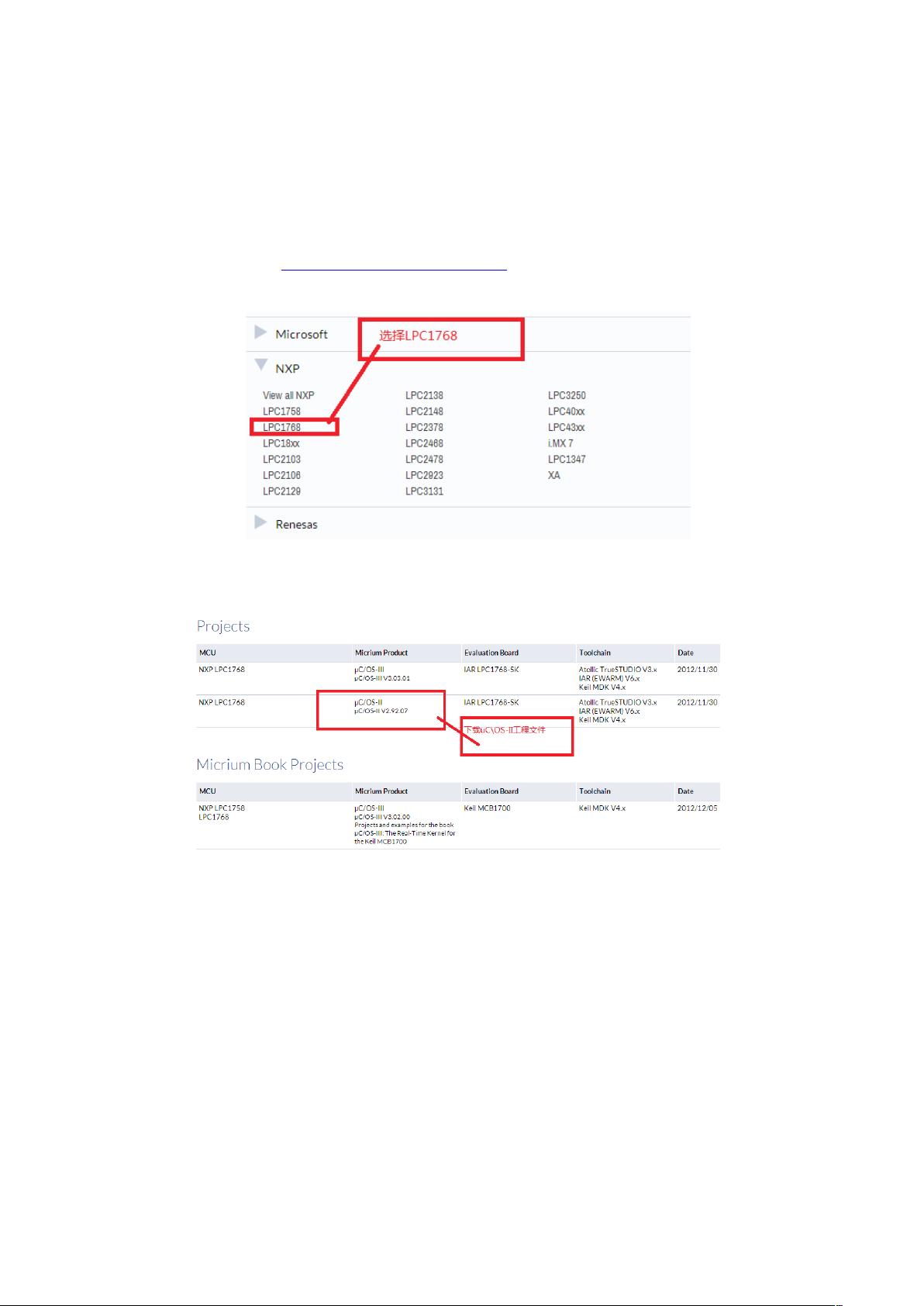
为了进行移植,你需要从Micrium官网下载针对LPC1768的工程模板。这些模板包含必要的驱动和配置文件,如uC-CPU、uC-LIB和UCOS-II。下载后,将相关文件夹复制到你的项目目录中。确保正确地将所有必需的头文件和源代码组织在对应的文件夹下,例如uCOS_DEMO、Port、Source和App。
接下来,你需要创建并配置特定于应用的文件,如app_cfg.h、app_hooks.c、cpu_cfg.h、includes.h和os_cfg.h。这些文件用于定义系统配置、任务调度、中断处理以及与硬件平台相关的设置。
在工程目录中,添加特定于uCOS的源文件,这包括在Port目录下添加移植所需的底层驱动,在Source目录下添加RTOS核心功能的源代码,在App目录下添加应用任务的实现。同时,确保所有头文件的路径被正确地链接,以便编译器可以找到它们。
移植的关键步骤之一是修改启动文件startup_LPC17XX.s。你需要更新 PendSV 和 SysTick 中断处理程序的定义,以适应uCOS的调度机制。具体来说,你需要将指定行替换为uCOS提供的中断服务例程。
移植完成后,你可以创建和运行两个示例任务,以验证uCOS是否成功地在LPC1768上运行。主函数应负责创建这些任务。在成功编译并烧录到开发板后,预期的实验现象是LED灯闪烁三次然后常亮,这表明uCOS的定时器和任务切换功能已正常工作。
这个移植过程涵盖了从获取必要的软件资源,到配置文件、修改启动代码,以及实现基本任务的整个流程。通过遵循这个手册,开发者能够掌握如何在新的硬件平台上有效地部署和运行uCOS,从而为复杂的嵌入式系统设计奠定基础。
下载后可阅读完整内容,剩余5页未读,立即下载
2019-05-23 上传
2020-03-30 上传
2023-06-05 上传
2023-11-16 上传
2024-04-08 上传
2023-07-28 上传
2023-07-27 上传
2023-06-12 上传
2023-05-15 上传

zxb_2000
- 粉丝: 1
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- 李兴华Java基础教程:从入门到精通
- U盘与硬盘启动安装教程:从菜鸟到专家
- C++面试宝典:动态内存管理与继承解析
- C++ STL源码深度解析:专家级剖析与关键技术
- C/C++调用DOS命令实战指南
- 神经网络补偿的多传感器航迹融合技术
- GIS中的大地坐标系与椭球体解析
- 海思Hi3515 H.264编解码处理器用户手册
- Oracle基础练习题与解答
- 谷歌地球3D建筑筛选新流程详解
- CFO与CIO携手:数据管理与企业增值的战略
- Eclipse IDE基础教程:从入门到精通
- Shell脚本专家宝典:全面学习与资源指南
- Tomcat安装指南:附带JDK配置步骤
- NA3003A电子水准仪数据格式解析与转换研究
- 自动化专业英语词汇精华:必备术语集锦
