ROS环境下调试ORB_SLAM3与occ_grid_mapping问题及解决方案
需积分: 0 80 浏览量
更新于2024-08-03
收藏 19.27MB PPTX 举报
"ORB_SLAM3调试与栅格地图构建技术"
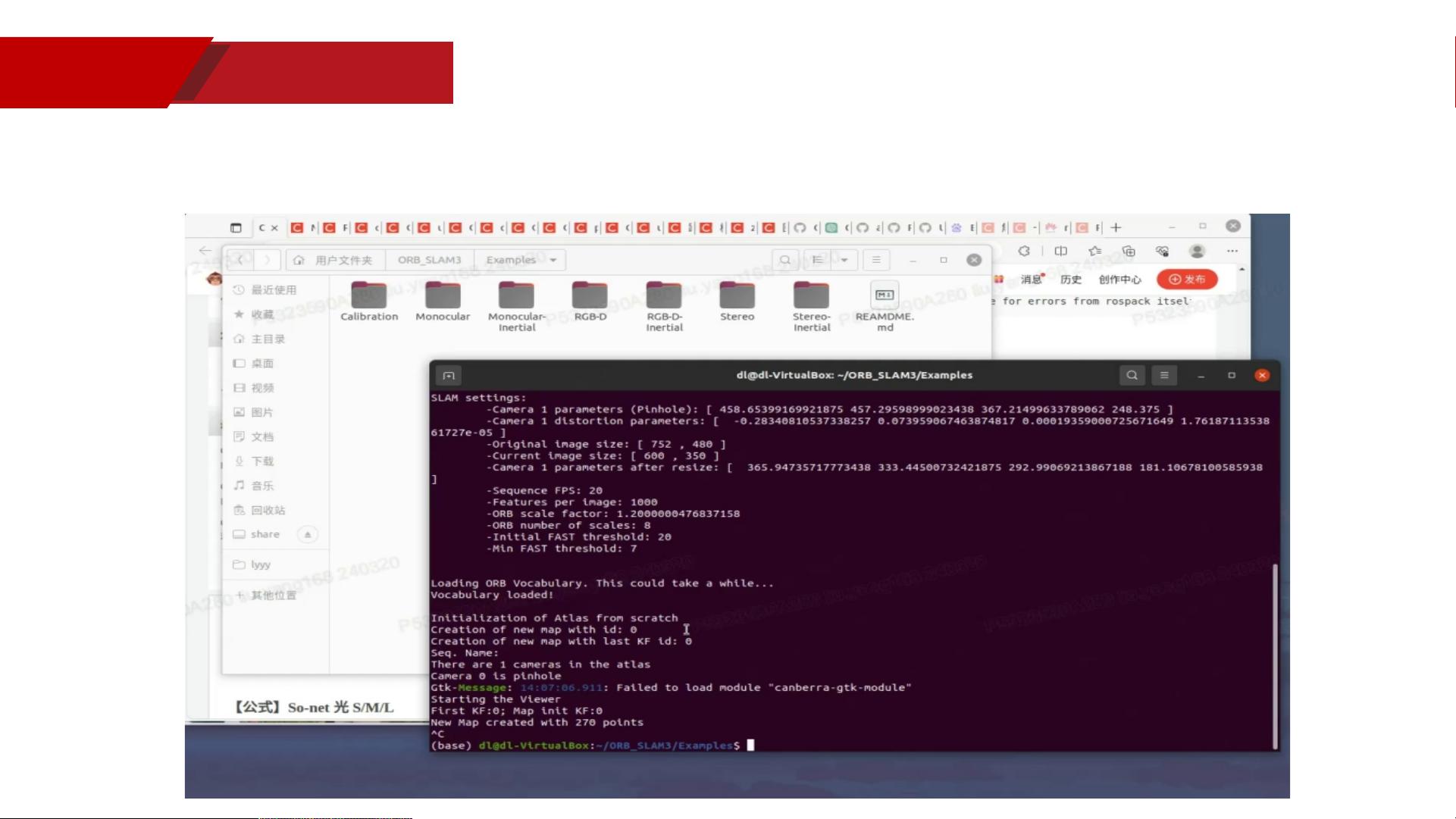
在本次的工作汇报中,新技术研究部的刘洋主要关注了两项关键任务:ORB_SLAM3的调试以及栅格地图构建代码的调试。ORB_SLAM3是一种先进的视觉SLAM(Simultaneous Localization And Mapping)系统,它能够实时地估计机器人在环境中的位置并构建地图。在ORB_SLAM3_Grid_Mapping部分,刘洋遇到了编译问题。在尝试编译时,由于缺少PY_EM模块,CMake报错找不到Python模块'em'。这个问题通常可以通过安装python3-empy包来解决,但在此情况下,即使创建新的ROS工作空间并指定Python3解释器,问题仍然存在。最终,通过Conda包管理器安装了empy包,成功解决了编译错误。
在编译ORB_SLAM3_Grid_Mapping时,还遇到了因OpenCV版本导致的失败。这可能是因为某些功能在特定OpenCV版本中不兼容或者缺失。为了解决这个问题,刘洋计划尝试更换OpenCV的版本以适应ORB_SLAM3的要求。
另一项工作是调试occ_grid_mapping,这是一个关于占用栅格地图的项目。占用栅格地图是机器人环境中广泛使用的表示方法,它将环境划分为一系列的栅格,并用每个栅格的状态(如空闲或被占用)来描述空间的信息。刘洋可能正在开发或优化用于管理这些栅格地图的类,即GridMap,以确保更有效地根据接收到的数据更新栅格的位置。
后续工作包括继续调试ORB_SLAM3/Grid_Mapping,尤其是与OpenCV版本相关的部分,以及深入理解占据栅格地图的概念。占据栅格地图不仅用于SLAM,还在路径规划、避障等领域有重要应用。刘洋还将继续编写和优化代码,以实现更稳定和高效的地图构建与导航功能。
刘洋的工作涵盖了SLAM技术的实践和优化,特别是在处理点云数据和栅格地图构建方面的挑战,这些都是机器人自主导航领域中的关键技术。通过解决这些问题,可以提升机器人在未知环境中的定位和地图构建能力,从而推动整个自动驾驶和机器人技术的发展。
01
orb_slam3
orb_slam3算法:
剩余12页未读,继续阅读
2348 浏览量
197 浏览量
885 浏览量
944 浏览量
345 浏览量
272 浏览量
384 浏览量
362 浏览量
243 浏览量

LY☼
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Linux与iOS自动化开发工具集:SSH免密登录与一键调试
- HTML5基础教程:深入学习与实践指南
- 通过命令行用sonic-pi-tool控制Sonic Pi音乐创作
- 官方发布droiddraw-r1b22,UI设计者的福音
- 探索Lib库的永恒春季:代码与功能的融合
- DTW距离在自适应AP聚类算法中的应用
- 掌握HTML5前端面试核心知识点
- 探索系统应用图标设计与ioc图标的重要性
- C#窗体技巧深度解析
- KDAB发布适用于Mac Touch Bar的Qt小部件
- IIS-v6.0安装文件压缩包介绍
- Android疫情数据整合系统开发教程与应用
- Simulink下的虚拟汽车行驶模型设计
- 自学考试教材《操作系统概论》概述
- 大型公司Java面试题整理
- Java 3D技术开发必备的jar包资源
