惯性导航系统MATLAB工具箱用户手册
版权申诉
189 浏览量
更新于2024-06-29
收藏 1.42MB DOCX 举报
"惯性导航工具箱是一款专为Matlab平台设计的软件工具,用于进行惯性导航系统的仿真和分析。该工具箱包含了多种函数,覆盖了从坐标转换、动力学仿真到误差分析等多个方面,旨在帮助用户理解和研究惯性导航技术。"
介绍
惯性导航工具箱提供了一个全面的环境,用户可以在此环境中进行惯性导航系统的建模、仿真和数据分析。它包括了多种函数,如坐标转换、地球动力学模型、传感器漂移建模以及导航误差分析等,适用于航空航天、航海以及其他需要精确位置和姿态信息的领域。
1. 航迹/飞行器动力学仿真
工具箱提供了对飞行器运动轨迹的仿真功能,用户可以模拟飞行器在不同条件下的动态行为,包括加速度、速度和姿态的变化。
2. 导航坐标系
工具箱支持多种导航坐标系之间的转换,如地心地固坐标(ECEF)、北东地坐标(ENU)、经纬度高度坐标(LLH)等,这对于处理多源数据至关重要。
3. 惯性导航简化模型
工具箱中包含了简化3D惯性导航模型,考虑了地球曲率、科氏效应以及加速度计漂移等因素,以便于理解和分析惯性导航系统的行为。
4. 传感器漂移和噪声
工具箱允许用户模拟陀螺仪和加速度计的漂移,以及它们的噪声特性,这对于评估系统性能和校准至关重要。
5. 初始化误差
用户可以设置初始速度误差和姿态角误差,以研究这些误差对导航结果的影响。
6. 地球大圆轨迹
工具箱可以生成和显示地球大圆轨迹,并结合惯性导航进行轨迹跟踪。
7. 游动方位角系统
工具箱还提供了处理游动方位角的函数,这对于航空和航海导航特别有用。
8. 参考文献和参考资料
工具箱附带了相关的参考文献和资料,有助于用户深入理解惯性导航背后的理论和算法。
安装说明
对于Matlab 5.x版本,用户需要在"C:\matlab\toolbox"目录下创建一个新的"ins"子目录,并将磁盘上的所有内容复制到这个子目录中。之后,备份并更新MATLAB的路径定义文件"pathdef.m",将"ins"子目录添加到MATLAB路径中。完成这些步骤后,重启MATLAB,惯性导航工具箱就会生效。
请注意,由于某些程序可能需要大量计算,使用较旧的CPU可能会导致运行速度较慢。因此,推荐使用性能较好的硬件来确保工具箱的高效运行。
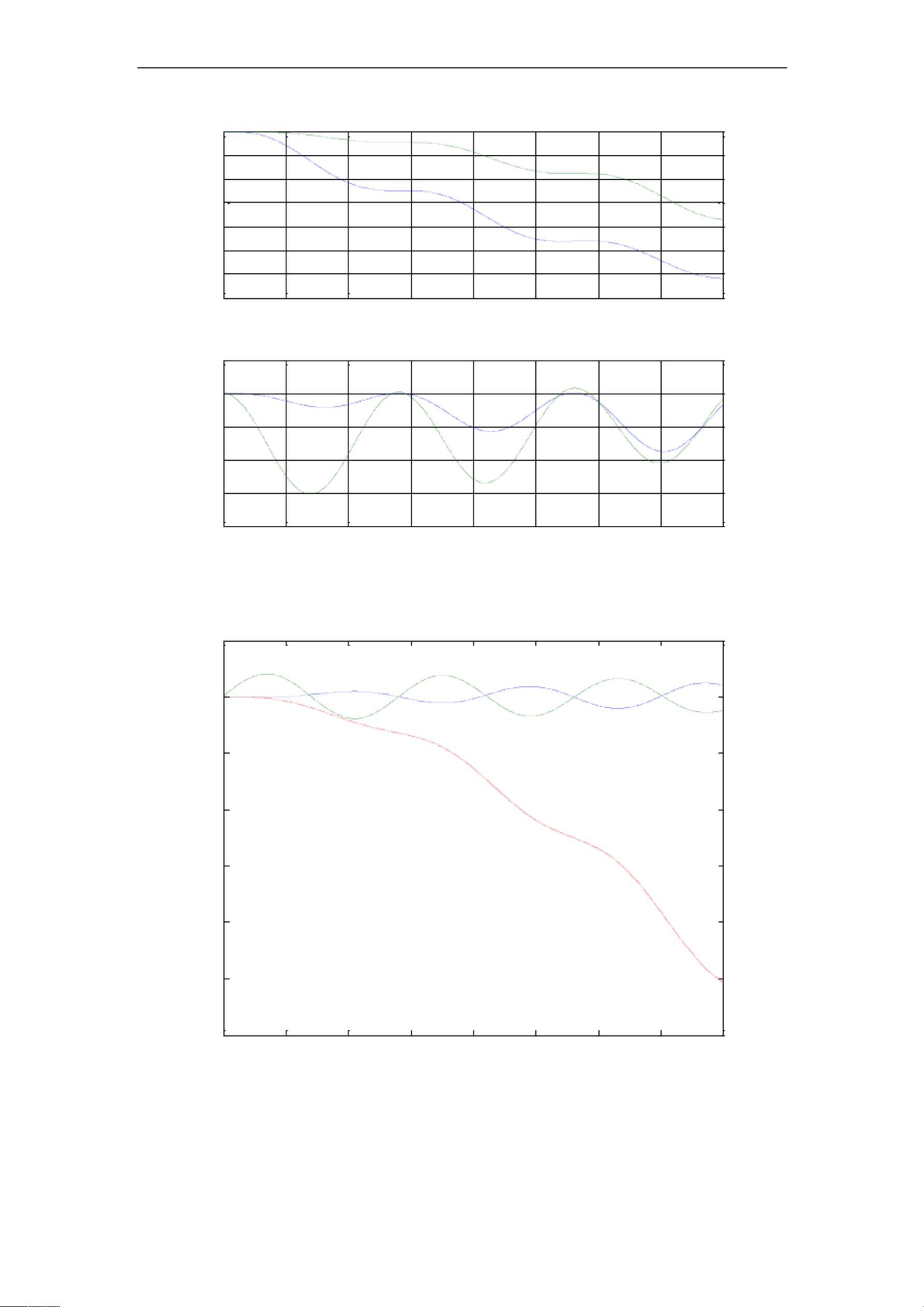
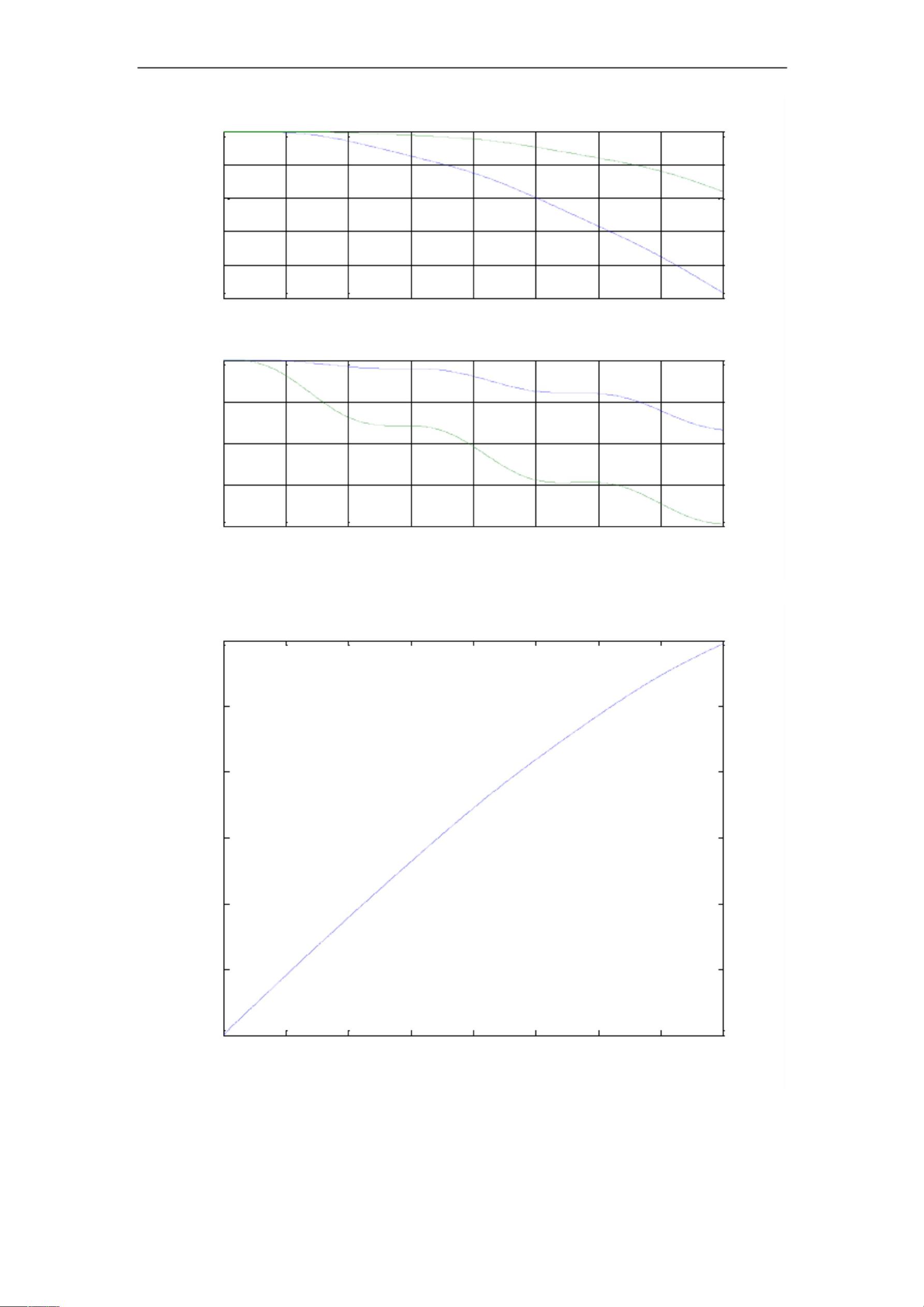
INSDEM07: 0.001 deg/hr East Gyro Bias
c
r
a
n
i
r
r
r
e
0
1
2
3
3.5
4
s
/
m
n
i
r
o
r
r
e
t
i
c
o
l
e
0
1
2
3
3.5
4
INSDEM07: Euler Angle Errors
roll
pitch
s
d
c
r
a
n
i
r
o
r
r
e
yaw
0
0.5
1
1.5
2
2.5
3
3.5
4
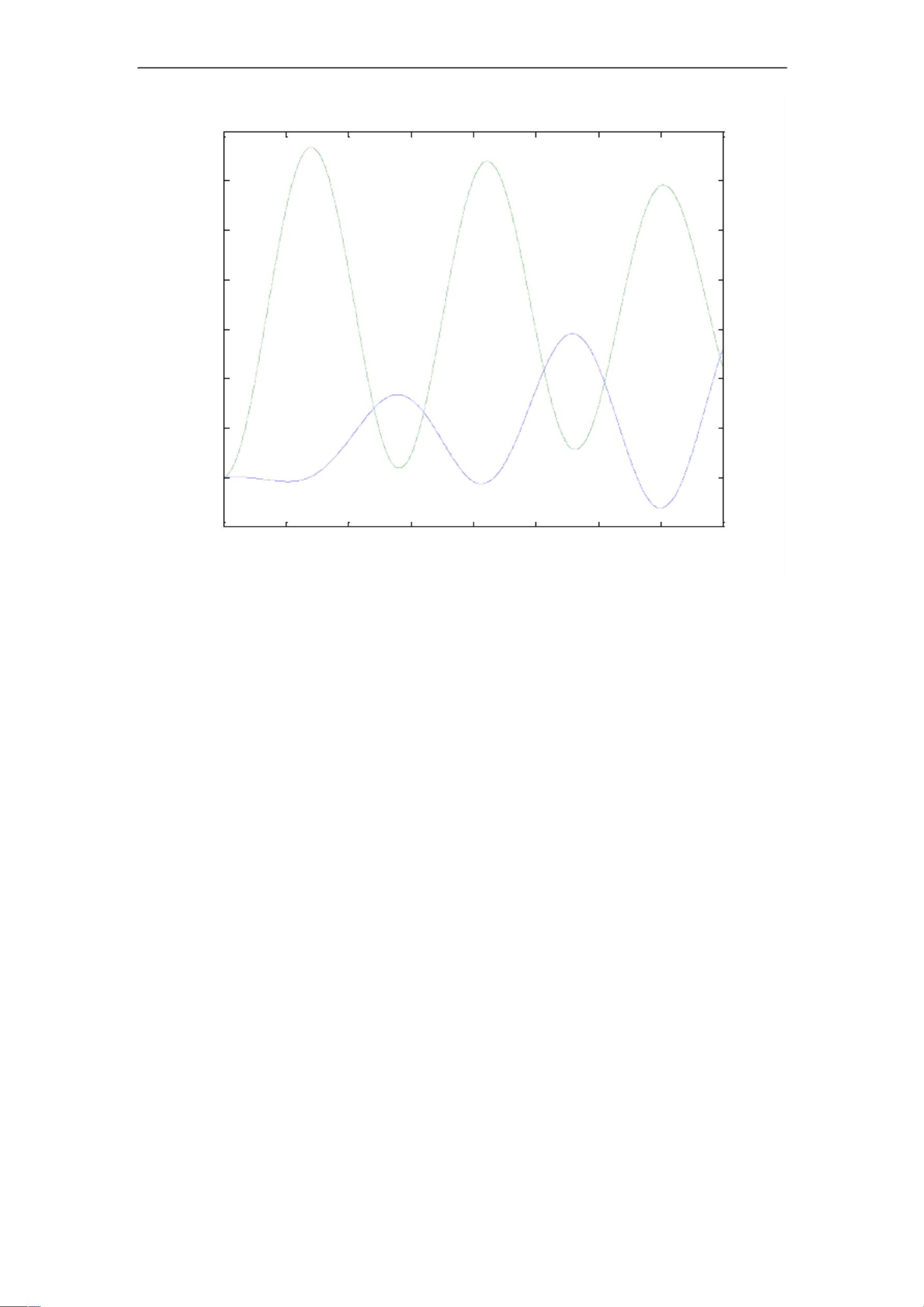
垂直陀螺漂移效果在 insdem08 中可以显示出来:
剩余61页未读,继续阅读
2022-11-13 上传
2022-11-27 上传
160 浏览量
605 浏览量
755 浏览量
640 浏览量
585 浏览量
551 浏览量
721 浏览量

春哥111
- 粉丝: 1w+
 我的内容管理
展开
我的内容管理
展开







最新资源
- STM32系列单片机 sms模拟器实验教程
- Flutter计时器应用开发入门教程
- category-explorer: 用JavaScript递归构建类别树形结构
- WindowBuilder Pro 2:Eclipse插件下的Java GUI设计神器
- 混凝土配合比施工参考手册软件发布
- 易修改型CPA网站诱惑源码快速部署指南
- Ralink 3070无线网卡驱动安装及使用指南
- Webapp如何管理议会问题的工作流程详解
- Mac 10.7.2 黑苹果安装利器 - OSInstall+OSInstall.mpkg
- Next.js框架简单演示及其优势解析
- STM32-F系列单片机电子-SMS项目压缩包
- C# IP输入组件:规范IP地址输入工具的使用与集成
- Java技术栈微信小程序商城后端与前端开发详解
- C++实现作业与进程调度模拟教程
- JavaScript选择API及范围选择示例分析
- React-Native动画通知发送实现指南
