ADAMS与MATLAB协同下电动助力转向系统控制策略验证
版权申诉
105 浏览量
更新于2024-06-19
2
收藏 1.17MB PDF 举报
电动助力转向系统(EPS)作为现代汽车领域的创新技术,本文主要针对基于ADAMS和MATLAB的控制策略进行深入研究。作者首先概述了EPS相较于传统机械式和液压助力转向系统的优势,包括节能、环保、结构简化、重量减轻以及布置灵活性,这表明了EPS在汽车行业中日益重要的地位。
研究的核心目标是通过集成虚拟样机技术,利用仿真软件如ADAMS/Car和MATLAB/Simulink来设计并验证一个有效的控制策略。ADAMS/Car软件被用来构建一个详细的汽车模型,包括转向系统、悬挂系统、轮胎模型以及车身子系统,通过对车辆参数的设定和路面特性的编辑,确保模型的精确性。通过方向盘角脉冲试验,模型的准确性得到了实际验证。
MATLAB/Simulink则被用于电动助力转向系统的控制策略设计,包括助力特性曲线模型、自适应模糊PID控制模型、电机模型和脉冲控制模型等。自适应模糊PID控制模型在此发挥了关键作用,它结合了模糊逻辑的灵活性和PID控制器的稳定性,旨在提供更高效的控制性能。作者通过仿真分析对比,最终确定了自适应模糊PID控制策略作为研究的主要控制方法。
接下来,文章将这两个软件平台的优势结合起来,构建了一个机电联合仿真模型,以便在控制策略研究中同时考虑PID控制的传统方法和自适应模糊PID控制。通过操纵稳定性仿真试验,明显地展示了自适应模糊PID控制在提升汽车行驶性能方面的优越性,这与论文的研究目标相符。
本论文通过实证研究,证明了基于ADAMS和MATLAB的自适应模糊PID控制策略对于电动助力转向系统具有显著的优势,不仅提高了系统的效率和舒适性,也体现了作者在该领域的专业知识和技术功底。论文的关键字包括电动助力转向系统、助力特性、控制策略以及联合仿真,全面展示了作者对该领域的深刻理解和应用能力。

中北大学学位论文
6
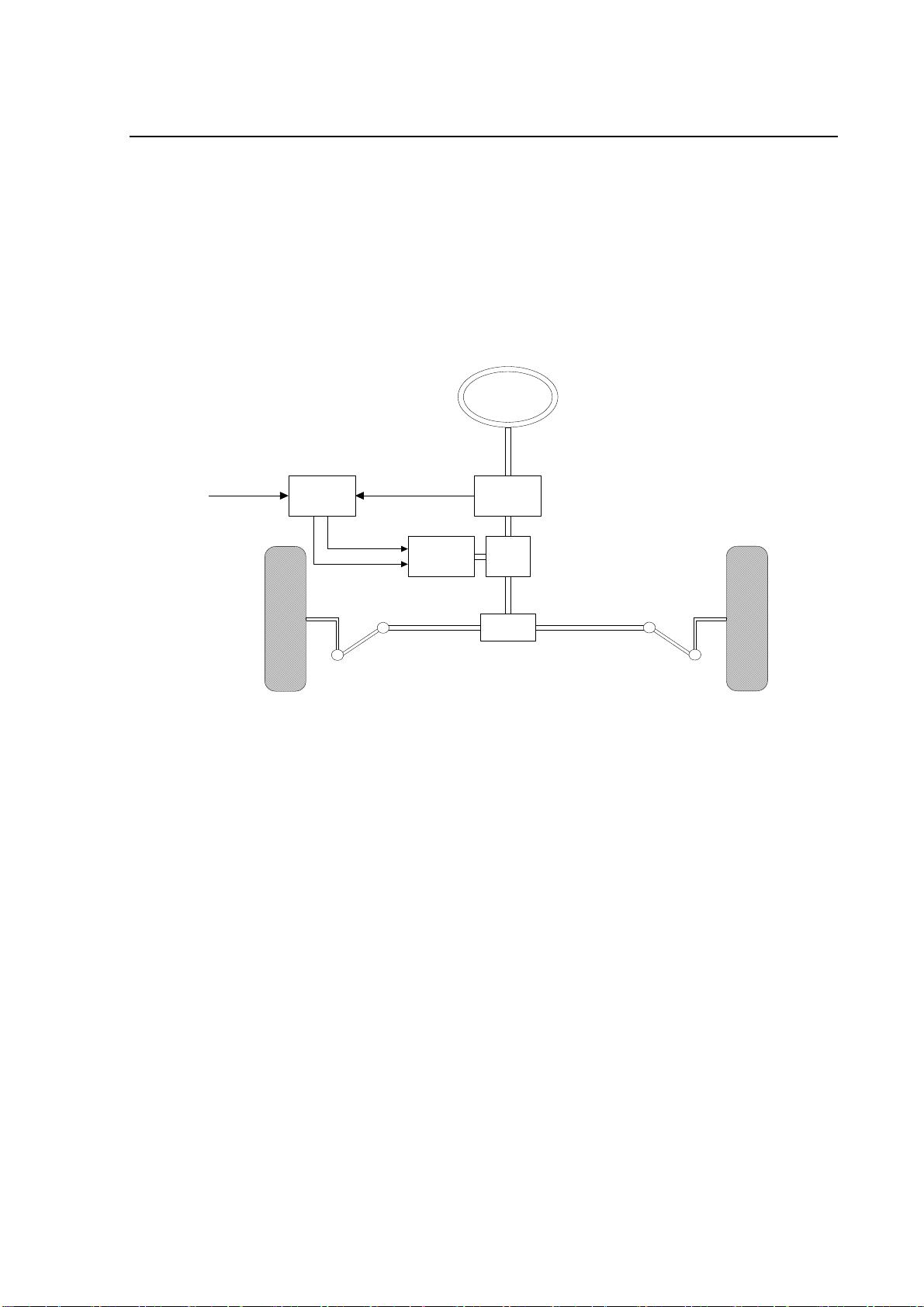
中,转向盘和转向轮之间是没有任何机械连接的。图 2.4 是电动助力转向系统和线控转
向系统结构对比。
转向柱
图 1.3 电动助力转向系统与线控转向系统的对比
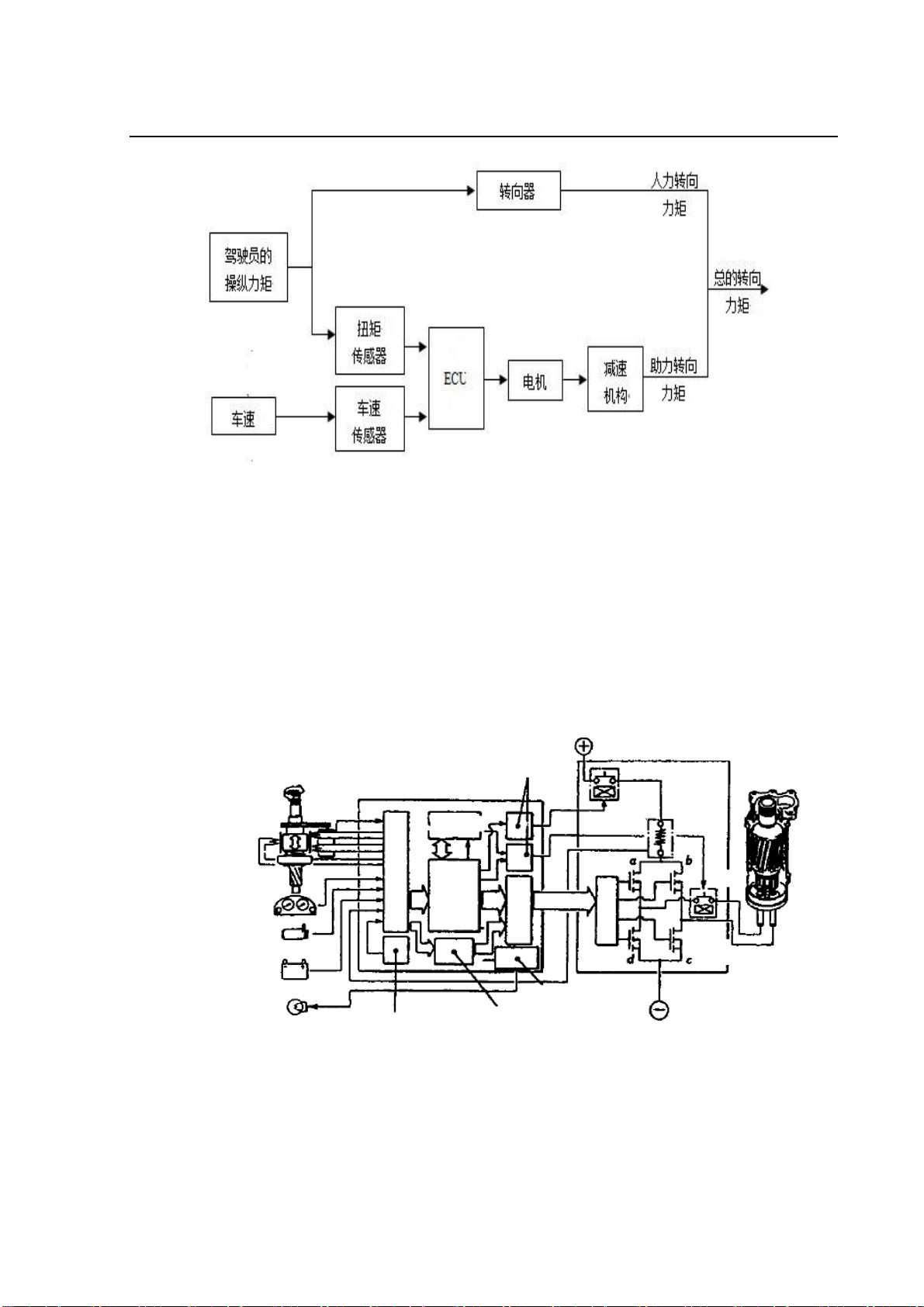
在线控转向系统中,由转角传感器测出驾驶员施加在转向盘上的转角信号,然后经
过一个合适的传动比转换后,作为控制转向车轮的参考转角;与此同时,通过扭矩传感
器测出转向车轮上受到的转向阻力距,然后反馈给转向盘下方的电动机,使之产生一个
合适的反力矩,让驾驶员获得满意的操纵力感。
1.4 本章小结
在本章中主要叙述了选题的背景、目的和意义,在进行本章的叙述中,查阅了大量
的国内外的资料,重点的总结了国内的一些研究机构以及各高校在电动助力方面的研究
进度和所使用的研究方法;另外,通过反复的查阅资料,也对电动助力转向系统的控制
策略的进行了介绍,以便为确定本文所使用的控制策略建立基础。
剩余70页未读,继续阅读
2023-10-29 上传
2023-10-29 上传
2023-10-29 上传
2023-11-01 上传
2023-10-30 上传
2023-11-01 上传


icwx_7550592
- 粉丝: 20
- 资源: 7163
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
