倍福TwinCAT3运动控制教程:伺服编程精华
需积分: 35 110 浏览量
更新于2024-07-12
1
收藏 5.98MB PDF 举报
"这是一份关于倍福(Technical Automation Control and Communication)的TwinCAT3运动控制教程,主要讲解如何使用TwinCAT3软件进行伺服控制。教程适合熟悉IEC61131-3,C/C++或MATLAB®/Simulink®编程语言的读者学习。"
在TwinCAT3运动控制教程中,涵盖了以下几个关键知识点:
1. **TwinCAT3系统概述**:TwinCAT3是倍福开发的一款基于PC的控制软件,以其模块化设计和灵活性著称,广泛应用于各种自动化场景,如印刷、木工、塑料机械等。该系统支持多种编程语言,包括IEC61131-3、C/C++和MATLAB®/Simulink®,提供丰富的控制功能和安全应用。
2. **TwinCAT NC PT(Precision Time Protocol)**:这是TwinCAT3中的运动控制部分,与PLC系统紧密关联,用于管理NC轴的控制周期。教程会介绍NC轴的种类及其工作原理。
3. **驱动器扫描与轴调试**:第二章详细讲解如何配置驱动器参数和轴设置,以实现单轴和多轴的调试。读者将学习如何调整轴的重要参数以达到理想的伺服控制效果。
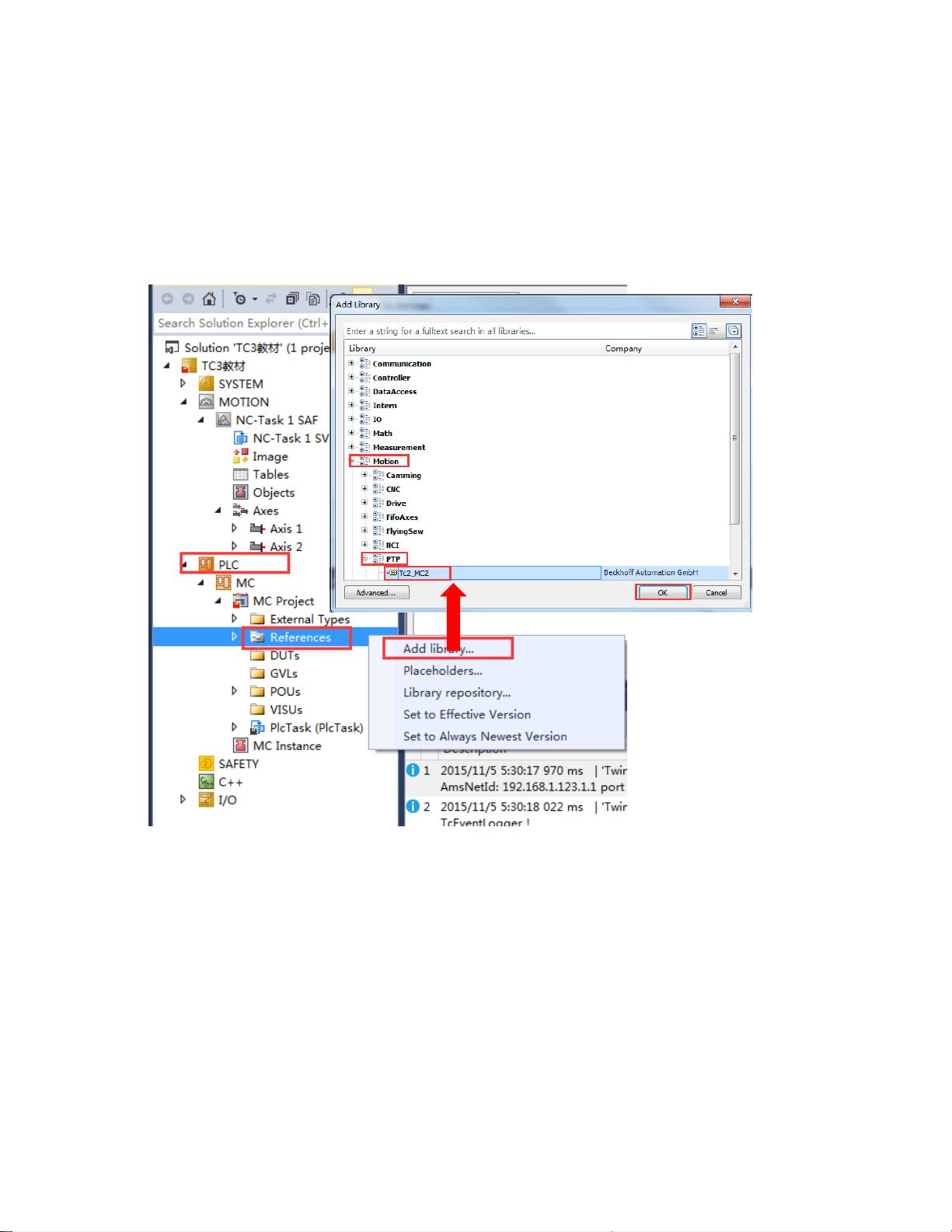
4. **NCPTP功能库**:教程深入介绍了如何使用库文件中的功能块,如使能、点动、绝对定位、电子齿轮和寻参等,这些都是运动控制的基础操作。
5. **高级功能应用**:从第四章到第八章,教程涵盖电子凸轮、位置外部设定值发生器、位置补偿、飞锯功能和fifo功能的使用场景、创建方法及编程技巧。这些高级功能在复杂的运动控制任务中起到关键作用。
6. **参数修改与PLC编程**:第九章专门讨论如何通过PLC程序来调整NC轴的参数,以适应不同的工作需求。
教程还强调,所有内容会不断更新,并在指定的FTP服务器上提供最新的教材和示例程序,方便读者学习和实践。遇到任何问题或发现错误,读者可以向指定邮箱反馈。
通过这份教程,读者不仅可以理解TwinCAT3的运动控制基础,还能掌握实际项目中的应用技巧,对提升在倍福系统中的伺服控制能力大有裨益。
14
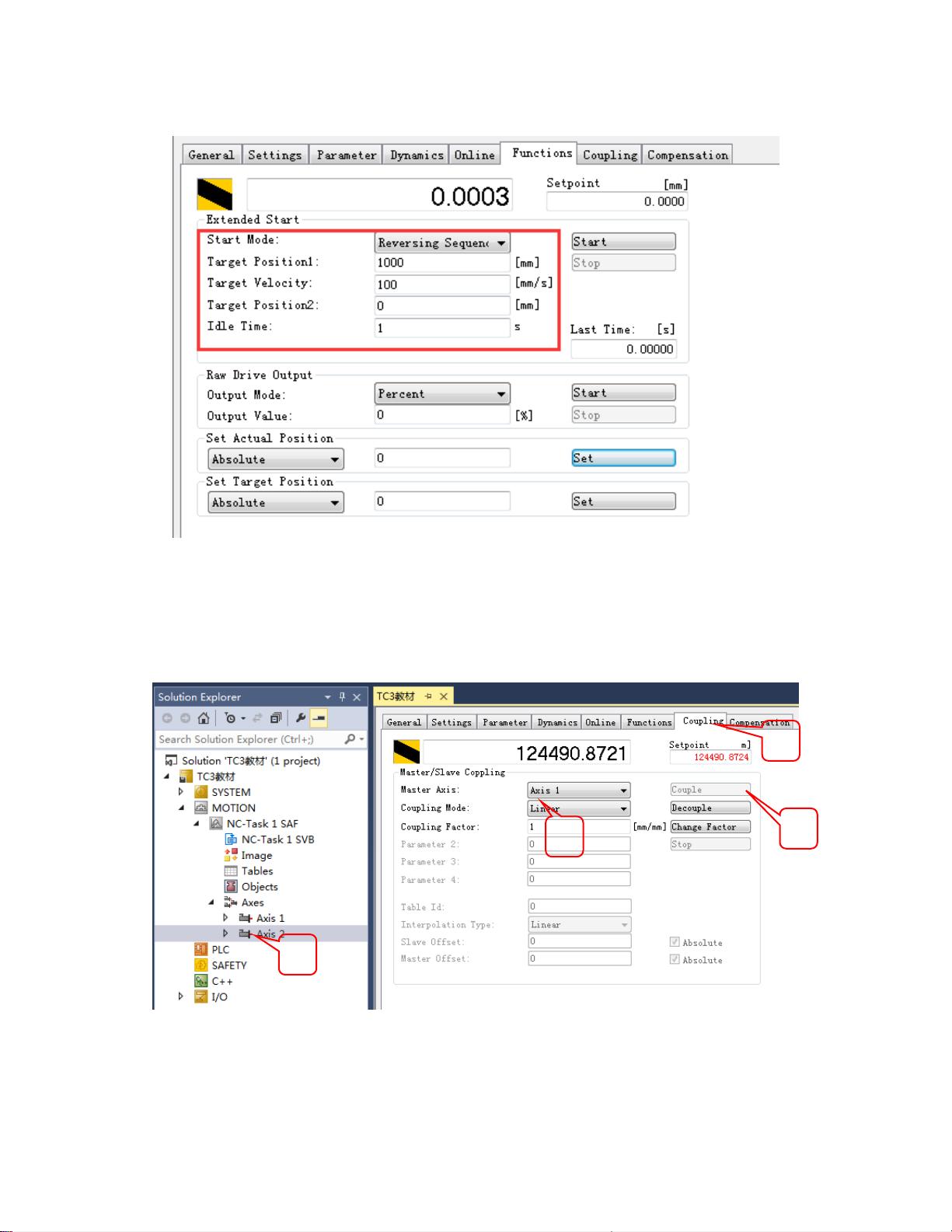
Position1 和 Position2 之间来回移动。
电子齿轮功能(主轴与从轴的速度保持比例关系,从轴跟随主轴移动):首先将两根
伺服轴都使能,然后选中 Axis2,Coupling 选项卡中,Master Axis 选择 Axis 1,Coupling
mode 设置为 linear,Coupling Factor 设置为 1,然后点击 Couple 进行耦合,此时看到
Axis2 的 Setpoint 变为红色,代表 Axis2 已经作为从轴处于耦合状态,不能单独对 Axis2 进
行控制了,此时控制 Axis1 轴动作的时候,Axis2 也会跟随动作,速度为 1:1,点击
Decouple 进行解耦,Change Factor 可以修改主从轴之间的速度比。
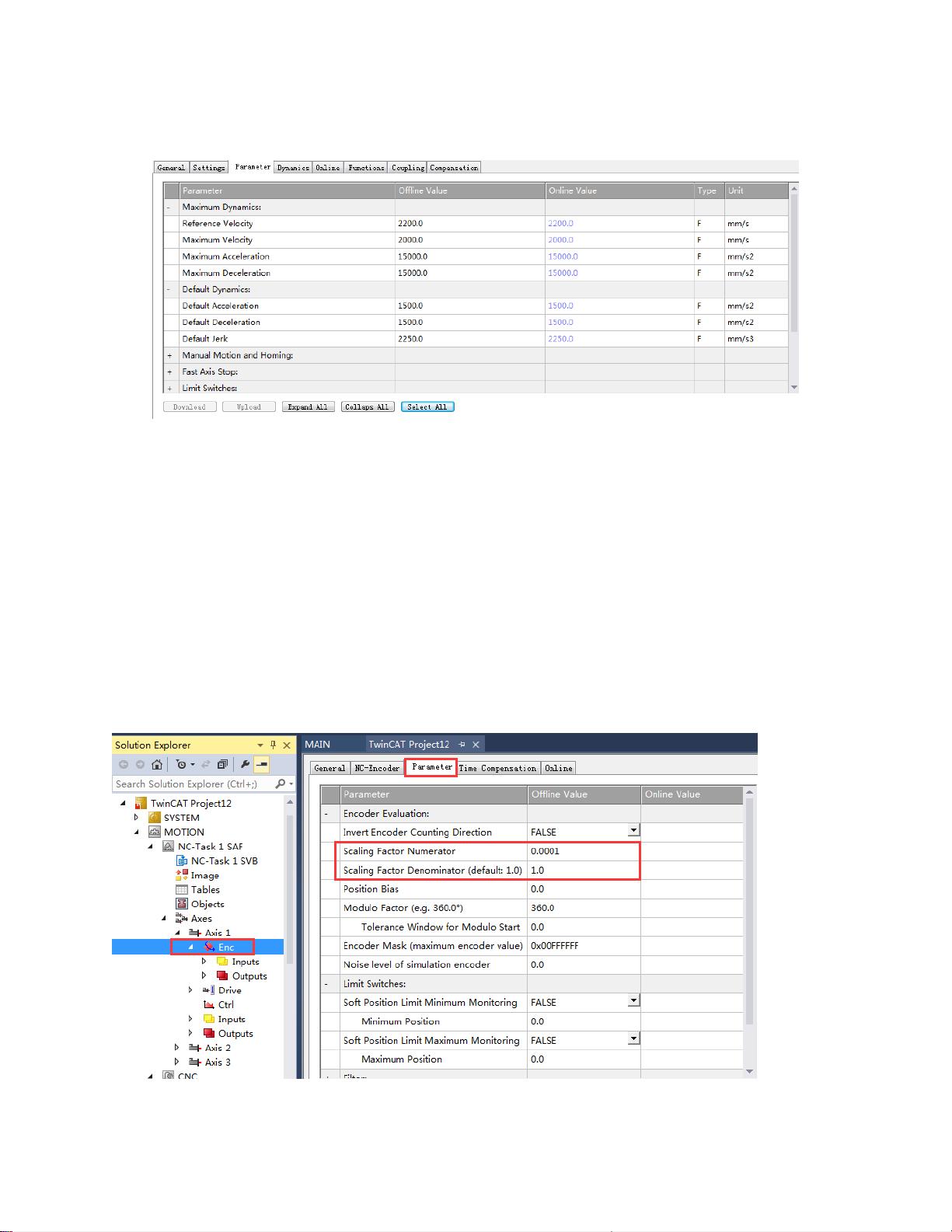
5. NC 参数设置
在 Parameter 选项卡中需要设置一些 NC 的参数,Reference Velocity 是参考速度,一般
为 Maximum Velocity 的 110%,Maximum Velocity 是轴的最大速度, Default Dynamics 展开
1
2
3
4

剩余117页未读,继续阅读
426 浏览量
2023-06-21 上传

u010456338
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Ruby开发的应用程序部署与运行指南
- DVR2009监控软件的安装与应用
- Windows服务器专用McAfee杀毒软件稳定版下载
- ayzom浏览器通知程序的功能与应用
- UcGUI完整源码与仿真工具包下载
- 智能状态更改神器:Smartle-crx插件解析
- PKPM地震波库:天然地震波归一化文件
- Java实现A*寻路算法深度解析
- 全面解读斗地主游戏源代码价值
- Java技术实现电子发票识别与验真功能
- Maven环境下JPA开发的最佳实践指南
- 技术交流必备:Aspose-Cells库的jar与授权文件
- CSS3实现文字边框背景动画特效教程
- JavaScript实现猜数字游戏
- 全面集成iOS支付解决方案的演示项目
- 实现轻巧留言功能的阿赛TXT留言本官方新版
