无人机搭载NeRF技术的高精度3D环境重建系统:FlyNeRF
需积分: 0 155 浏览量
更新于2024-08-03
收藏 3.11MB PDF 举报
FlyNeRF是一项基于神经辐射场(Neural Radiance Fields, NeRF)的空中三维重建技术,旨在解决当前3D重建和环境映射在精确度上面临的挑战。它将无人机数据采集与NeRF相结合,为高质素的3D场景重构提供了一种实用且高效的解决方案。
在现代3D重建方法中,诸如精度、光照捕捉和复杂场景的处理等方面存在局限性。FlyNeRF针对这些问题进行了创新,通过无人驾驶飞行器(UAV)收集图像和相应的空间坐标,这些数据被用于进行初始的NeRF基础3D重建。这种方法利用了NeRF强大的建模能力,能够捕捉场景中的光线交互,从而生成逼真的3D模型。
然而,仅仅依赖于原始的NeRF重建可能无法达到理想的视觉效果。因此,FlyNeRF引入了一种图像评价神经网络,该网络在系统内部被开发出来,专门用于评估重建图像的质量。通过分析网络的反馈,一个自主的算法会根据需要确定拍摄位置的优化策略,以获取更多关键细节或改善光照处理,进一步提升重建的细节和真实感。
这个图像评价模块是关键技术之一,它不仅评估了最终渲染质量,还作为反馈循环的一部分,驱动了实时的重建过程优化。通过这样的迭代过程,FlyNeRF能够在保持高效的同时,不断调整和改进3D场景的重建结果,使得最终的重建成果具有更高的精度和艺术表现力。
FlyNeRF不仅展示了如何利用NeRF技术进行空中3D重建,还展示了如何结合机器学习和自动化算法来增强传统方法,克服精度瓶颈,实现了更加精确、细腻和高质量的3D场景再现。这项研究对于推动无人机遥感技术、虚拟现实和增强现实等领域的发展具有重要意义。
FlyNeRF: NeRF-Based Aerial Mapping for High-Quality 3D Scene
Reconstruction
Maria Dronova, Vladislav Cheremnykh, Alexey Kotcov, Aleksey Fedoseev, and Dzmitry Tsetserukou
Abstract— Current methods for 3D reconstruction and envi-
ronmental mapping frequently face challenges in achieving high
precision, highlighting the need for practical and effective solu-
tions. In response to this issue, our study introduces FlyNeRF, a
system integrating Neural Radiance Fields (NeRF) with drone-
based data acquisition for high-quality 3D reconstruction.
Utilizing unmanned aerial vehicle (UAV) for capturing images
and corresponding spatial coordinates, the obtained data is
subsequently used for the initial NeRF-based 3D reconstruction
of the environment. Further evaluation of the reconstruction
render quality is accomplished by the image evaluation neural
network developed within the scope of our system. According
to the results of the image evaluation module, an autonomous
algorithm determines the position for additional image capture,
thereby improving the reconstruction quality.
The neural network introduced for render quality assessment
demonstrates an accuracy of 97%. Furthermore, our adaptive
methodology enhances the overall reconstruction quality, re-
sulting in an average improvement of 2.5 dB in Peak Signal-
to-Noise Ratio (PSNR) for the 10% quantile. The FlyNeRF
demonstrates promising results, offering advancements in such
fields as environmental monitoring, surveillance, and digital
twins, where high-fidelity 3D reconstructions are crucial.
I. INTRODUCTION
Autonomous navigation remains a significant challenge in
the development of agents designed to operate in unknown
environments such as cluttered rooms and facilities. Recently,
Neural Radiance Field (NeRF) technology has found many
applications in robotics, one of the most promising being
the reconstruction of 3D scenes for further use in navi-
gation, mapping, and path planning. However, despite its
capabilities, the quality of NeRF renderings is determined
by the quality of the input images, especially when the robot
captures them at high speed, under challenging conditions, or
from an unfavorable angle. Low-quality renders affect path
planning and localization of the autonomous agent, leading
to poor construction of the 3D map.
In the topic of exploration of unseen environments previ-
ous works have mainly focused on optimization of reward
policies [1], [2] to maximize the survey area, finding a spe-
cific group of targets [3], [4], recognizing by images or lan-
guage [5], [6], [7]. In our work, the main focus is assessing
render quality and improving it with an autonomous agent
using data from our neural network. Through this process, we
obtain information about camera poses where image quality
is below a certain threshold. This information is later used
The authors are with the Intelligent Space Robotics Laboratory, Skolkovo
Institute of Science and Technology, Bolshoy Boulevard 30, bld. 1, 121205,
Moscow, Russia
email: (maria.dronova, vladislav.cheremnykh, alexey.kotcov,
aleksey.fedoseev, d.tsetserukou)@skoltech.ru
3D reconstruction
quality
enhancement
Drone for
environmental
mapping
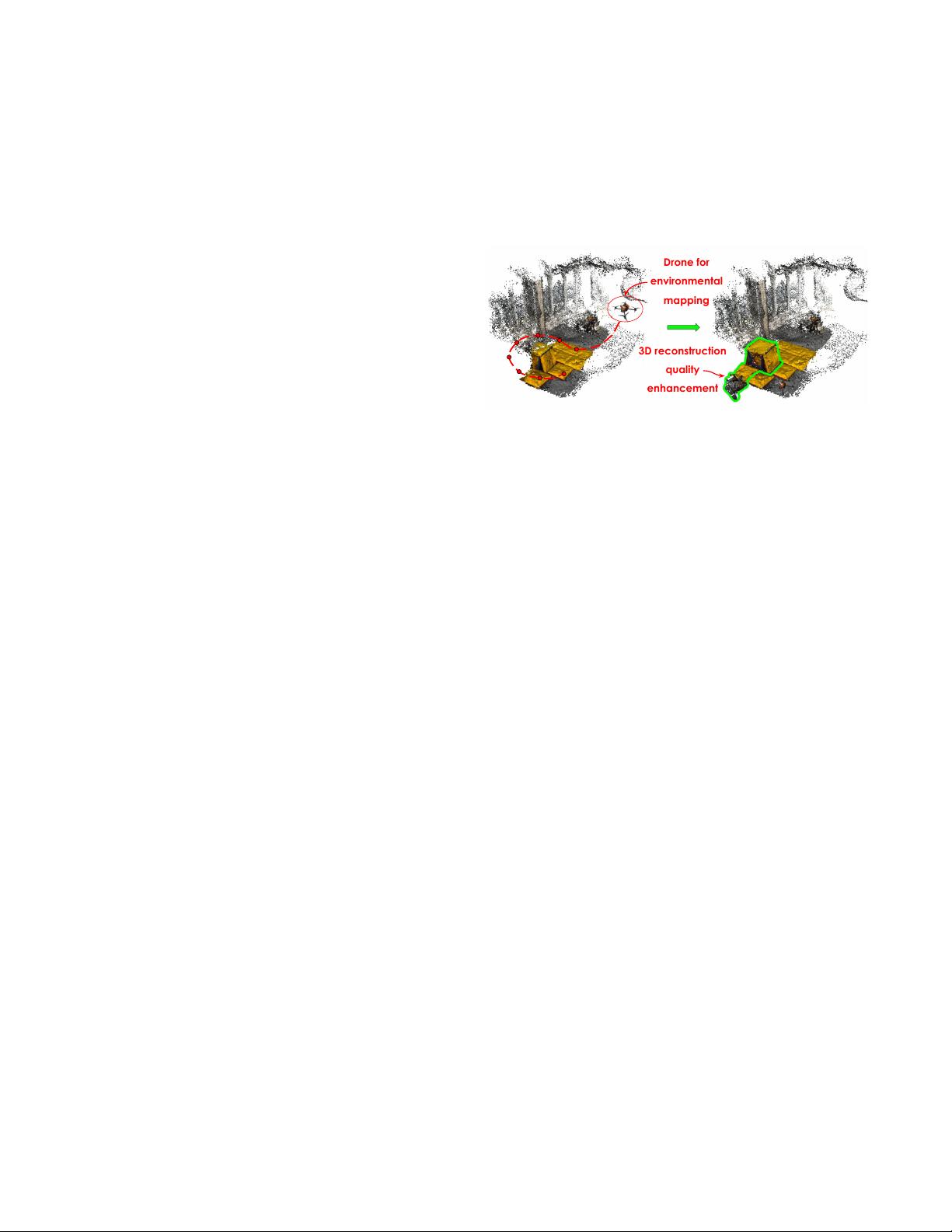
Fig. 1: FlyNeRF system during the mission. The dashed red
line with dots represents the trajectory executed by the drone
and positions for additional image capture. The green area
signifies the improvement in the quality of the reconstruction.
by the agent to provide new images. By iteratively refining
the dataset with novel images, our proposed framework aims
to improve the overall quality of the NeRF renderings and
the accuracy of the associated 3D reconstructions.
In summary, we present FlyNeRF (Fig. 1), a novel system
utilizing UAV to explore an unseen scene to collect and
refine data for training a NeRF model. Our method uses a
neural network-based quality assessment approach to identify
images of poor quality based on Structural Similarity Index
(SSIM) and Peak Signal-to-Noise Ratio (PSNR) metrics.
These identified images, which are indicative of poor camera
poses or environmental conditions, are then used to generate
the list of positions and orientations for additional image
capture during the subsequent drone flight.
II. RELATED WORKS
Neural Radiance Fields. Implicit neural representations,
particularly NeRF, pioneered by Mildenhall et al. [8], of-
fer a novel approach to generating complex 3D scenes.
Leveraging neural networks to encode scene spatial layouts,
NeRF represents a significant advancement, introducing a
differentiable volume rendering loss. This innovation enables
precise control over 3D scene reconstruction from 2D ob-
servations, achieving remarkable performance in novel view
synthesis tasks. Despite the compelling properties and results
demonstrated by vanilla NeRF [8], the training process can
be time-consuming. For instance, it typically necessitates
approximately a day to train for a simple scene. This is
due to the nature of the volume rendering, which requires
a significant number of sample points to render an image.
Subsequent research efforts have focused on improving the
efficiency of the training and inference processes [9], [10],
[11], as well as overcoming the challenges of training from
arXiv:2404.12970v1 [cs.RO] 19 Apr 2024
下载后可阅读完整内容,剩余5页未读,立即下载
129 浏览量
725 浏览量
2024-09-19 上传
152 浏览量
106 浏览量
105 浏览量
384 浏览量
101 浏览量
226 浏览量

小张Tt
- 粉丝: 1w+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握PerfView:高效配置.NET程序性能数据
- SQL2000与Delphi结合的超市管理系统设计
- 冲压模具设计的高效拉伸计算器软件介绍
- jQuery文字图片滚动插件:单行多行及按钮控制
- 最新C++参考手册:包含C++11标准新增内容
- 实现Android嵌套倒计时及活动启动教程
- TMS320F2837xD DSP技术手册详解
- 嵌入式系统实验入门:掌握VxWorks及通信程序设计
- Magento支付宝接口使用教程
- GOIT MARKUP HW-06 项目文件综述
- 全面掌握JBossESB组件与配置教程
- 古风水墨风艾灸养生响应式网站模板
- 讯飞SDK中的音频增益调整方法与实践
- 银联加密解密工具集 - Des算法与Bitmap查看器
- 全面解读OA系统源码中的权限管理与人员管理技术
- PHP HTTP扩展1.7.0版本发布,支持PHP5.3环境
