旋转柔性梁振动控制研究:仿真与实验
需积分: 10 47 浏览量
更新于2024-08-07
收藏 262KB PDF 举报
"这篇论文是祝发荣、黄清华和陈德成于2002年在《北京大学学报(自然科学版)》发表的研究成果,主要探讨旋转柔性梁的振动控制,结合数值仿真和实验方法,研究了刚柔耦合系统的动力学特性,并使用压电陶瓷作为传感器和执行器进行实验验证。"
在旋转柔性梁的振动控制领域,这篇论文首先回顾和比较了已有的刚体-柔性附件耦合系统动力学模型。研究人员基于微元法,对旋转柔性梁的运动方程进行了深入解析,澄清了一些文献中关于模型理解的模糊之处。他们特别关注了梁的轴向位移在旋转过程中的变化,这是影响系统动力学行为的关键因素。
论文中提到,文献[1]通过Hamilton原理得到了小变形条件下的同性柔刚耦合系统动力学方程,而文献[2]区分了未刚化系统与刚化系统,后者更符合实际情况。文献[3]研究了附有集中质量的梁端动力学,而文献[4]则以Euler-Bernoulli梁为模型,考虑了大变形情况。这些前期工作为后续的仿真和实验提供了理论基础。
论文的核心在于利用位置正反馈控制律对旋转耦合系统中的柔性梁振动进行控制。通过数值仿真,作者展示了这种控制策略的有效性,进一步,他们采用压电陶瓷作为传感器和执行器,实际搭建了实验装置,对旋转柔性梁的振动控制进行了实验研究,并得到了初步的实验数据和分析结果。
这些研究对于理解旋转刚柔耦合系统的行为,特别是在航空航天、机械工程和精密仪器等领域具有重要意义,因为这些领域中常常涉及到柔性结构的振动问题。同时,通过压电陶瓷的使用,论文也展示了主动控制技术在抑制振动方面的潜力,这对于提高系统性能和稳定性具有实际应用价值。
北京大学学报(自然科学版)
,第
38
卷,第
l
期,
2002
年
1
月
Ac
ta
Scientiarurn Naturaliurn
Universitatis Pekinensis
,
Vol
.38 ,
No
.l
(Jan
,2002)
旋转柔性梁的振动控制仿真及实验探讨。
祝发荣黄清华陈德成
(北京大学力学与工程科学系,北京,
100871
)
摘
要
在综合比较己有文献所建立的刚体-柔性附件祸合系统动力学模型的基础上,以微元法为
根据提出对旋转柔性梁运动方程中各项的理解澄清了某些文献中模糊的认识。利用位置正反馈
控制律,对旋转祸合系统中柔性梁的振动控制进行了数值仿真。并进一步利用压电陶瓷作为传感
器和致动器,从实验上探讨旋转柔性梁的振动控制并给出了初步的实验结果及分析。
关键词
刚柔祸合系统;旋转柔性梁;振动主动控制;位置正反馈;压电陶瓷
中图分类号
032;
回
535
1
旋转刚-柔相合系统的动力学模型
关于柔性机械臂、涡轮机叶片、直升机旋翼以及带有柔性附件的航天器等系统的动力学分
析,多以单个主体加单个柔性附件为模型,
tlp
作为一类中心刚体加上柔性梁的旋转同性柔搞合
系统,如图
1
所示。
r
n
F
古
YILDii;
文献[
1
]针对不同的梁模型采用
Hamilton
原理得到了小变形条件下一般性的同性柔搞合
系统的动力学方程。即使不考虑、梁轴线的伸长
量,梁的轴向位移在随动坐标系中的投影与未
变形时相比仍有变化。文献[
2]
将忽略该变化
量的系统称为未刚化系统,而考虑了该变化量
的系统则为刚化系统,给出这两类系统关于梁
的横向振动方程并进行稳定性分析,证明了刚
化系统的动力学方程更合理。文献[
3
]讨论了
梁自由端附有集中质量时搞合系统的动力学方
程,并给出不同参数下的仿真结果。文献[
4]
中
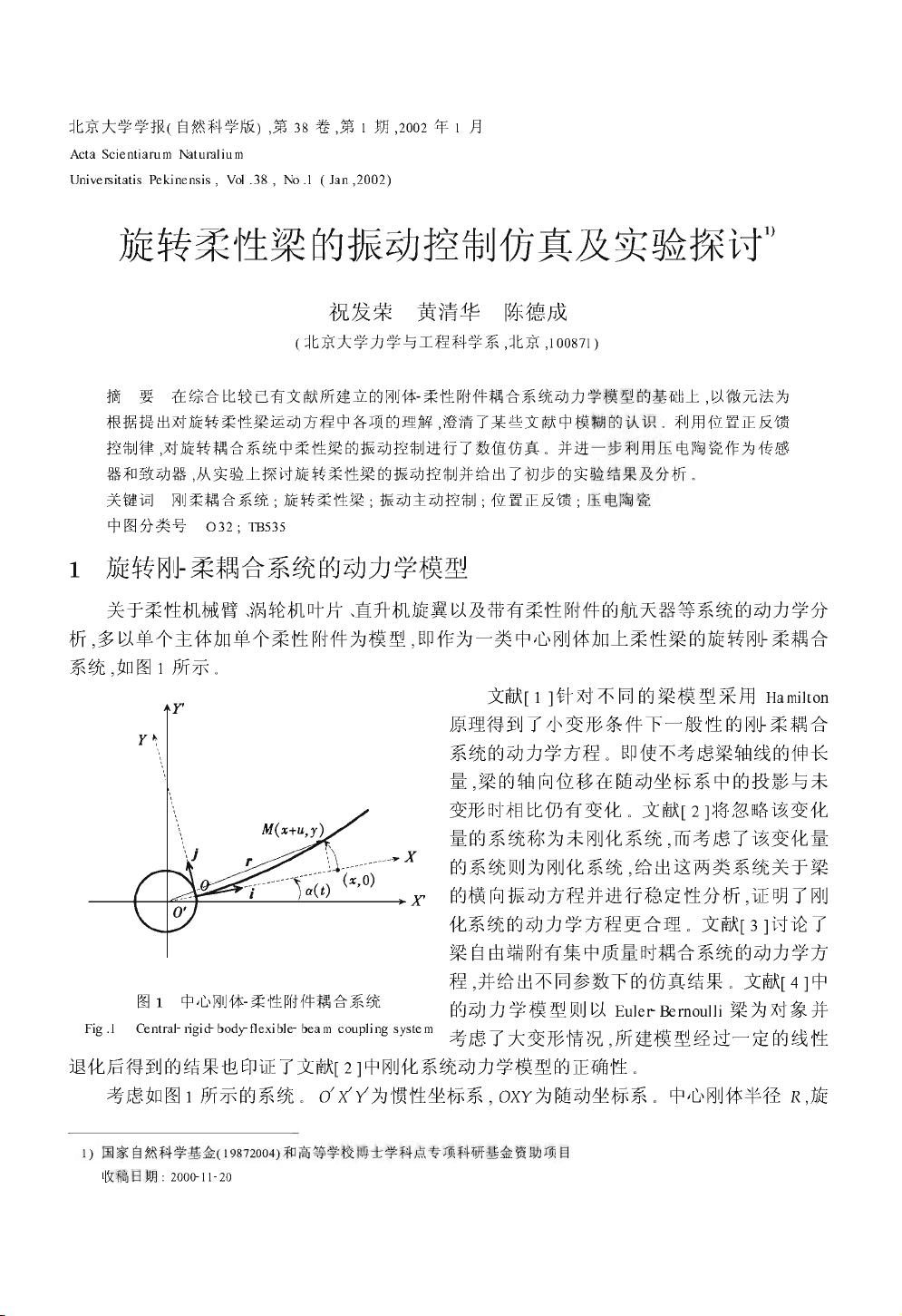
图
1
中心刚体-柔性附件祸合系统
的动力学模型则以
Eule
r-
Be
moulli
梁为对象并
同
ce
由
al-
rigi
仕
bod
y-
flexible-
bearn coupling syste
rn
考虑了大变形情况所建模型经过一定的线性
退化后得到的结果也印证了文献[
2]
中刚化系统动力学模型的正确性。
考虑如图
1
所示的系统。
0
1
)(y'为惯性坐标系
,
OXY
为随动坐标系。中心刚体半径
R
,旋
1)
国家自然科学基金(
19872004)
和高等学校博士学科点专项科研基金资助项目
收稿日期
200
什
11-20
下载后可阅读完整内容,剩余5页未读,立即下载
2021-11-21 上传
点击了解资源详情
2021-04-26 上传
2019-12-29 上传
2021-05-29 上传
2021-09-15 上传
2021-05-16 上传
2021-09-26 上传
2021-04-27 上传

weixin_38702515
- 粉丝: 12
- 资源: 927
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM动力电池数据管理系统源码及数据库详解
- R语言桑基图绘制与SCI图输入文件代码分析
- Linux下Sakagari Hurricane翻译工作:cpktools的使用教程
- prettybench: 让 Go 基准测试结果更易读
- Python官方文档查询库,提升开发效率与时间节约
- 基于Django的Python就业系统毕设源码
- 高并发下的SpringBoot与Nginx+Redis会话共享解决方案
- 构建问答游戏:Node.js与Express.js实战教程
- MATLAB在旅行商问题中的应用与优化方法研究
- OMAPL138 DSP平台UPP接口编程实践
- 杰克逊维尔非营利地基工程的VMS项目介绍
- 宠物猫企业网站模板PHP源码下载
- 52简易计算器源码解析与下载指南
- 探索Node.js v6.2.1 - 事件驱动的高性能Web服务器环境
- 找回WinSCP密码的神器:winscppasswd工具介绍
- xctools:解析Xcode命令行工具输出的Ruby库
