基于NDOB的磁悬浮偏航系统建模及其鲁棒轨迹跟踪控制研究
46 浏览量
更新于2024-08-26
收藏 1.54MB PDF 举报
基于NDOB的悬浮着陆过程磁悬浮偏航系统建模及其鲁棒轨迹跟踪控制
本文研究了磁悬浮偏航系统(MYS)的建模和鲁棒轨迹跟踪控制,旨在提高MYS在悬浮和着陆过程中的动态悬架稳定性。首先,我们建立并分析了MYS的动力学模型,以及侧风作用在MYS上的力的模型,然后从其动力学模型推导了MYS的数学模型。
在MYS的数学模型中,我们考虑了来自MYS本身的不确定的内部扰动,为了实现有限的时间收敛并提高MYS的鲁棒性,我们设计了一种基于非线性扰动观测器(NDOB)的鲁棒控制器。该控制器借助反推设计思想(BDI)来确保系统输出渐近跟踪参考轨迹,并且MYS的悬浮和着陆速度在有限时间内全局且渐近收敛。
为了验证所提出的鲁棒控制器的有效性,我们进行了广泛的仿真实验。结果表明,所提出的鲁棒控制器具有更好的鲁棒性,并且MYS能够在有限的时间内在其悬浮和着陆过程中实现平稳可靠的运行。
在磁悬浮偏航系统建模方面,我们首先建立了MYS的动力学模型,然后从其动力学模型推导了MYS的数学模型。我们考虑了侧风作用在MYS上的力的模型,并将其纳入了MYS的数学模型中。
在鲁棒轨迹跟踪控制方面,我们设计了一种基于NDOB的鲁棒控制器。该控制器借助反推设计思想(BDI)来确保系统输出渐近跟踪参考轨迹,并且MYS的悬浮和着陆速度在有限时间内全局且渐近收敛。
在仿真实验方面,我们进行了广泛的仿真实验来验证所提出的鲁棒控制器的有效性。结果表明,所提出的鲁棒控制器具有更好的鲁棒性,并且MYS能够在有限的时间内在其悬浮和着陆过程中实现平稳可靠的运行。
本文提出了基于NDOB的悬浮着陆过程磁悬浮偏航系统建模及其鲁棒轨迹跟踪控制方法,该方法可以提高MYS在悬浮和着陆过程中的动态悬架稳定性,并且MYS能够在有限的时间内在其悬浮和着陆过程中实现平稳可靠的运行。
关键词:磁悬浮偏航系统、鲁棒轨迹跟踪控制、非线性扰动观测器、悬浮着陆过程、动态悬架稳定性。
在未来的研究中,我们将继续研究磁悬浮偏航系统的建模和控制问题,旨在提高MYS在悬浮和着陆过程中的动态悬架稳定性,并且MYS能够在有限的时间内在其悬浮和着陆过程中实现平稳可靠的运行。
此外,我们也将研究磁悬浮偏航系统在实际应用中的问题,例如在风力涡轮机中的应用,并探讨其在提高风力涡轮机的效率和可靠性方面的潜力。
to the equilibrium position under the action of electromag-
netic force. In the landing process, the suspension electro-
magnet together with the nacelle moves down to the rest
position under the action of electromagnetic force and grav-
ity. So in order to meet the requirements for the fast dynamic
response of the MYS especially in the case of crosswind dis-
turbance, as well as to avoid the mechanical impact on the
MYS especially in the landing process, it is very important
to control the electromagnetic force quickly and precisely.
This section gives the dynamic model of the MYS and
the model of the force caused by crosswind. Finally, the dy-
namic model is conve-rted to its mathematical model by ap-
propriate state space description.
2.1 The dynamic model of the MYS
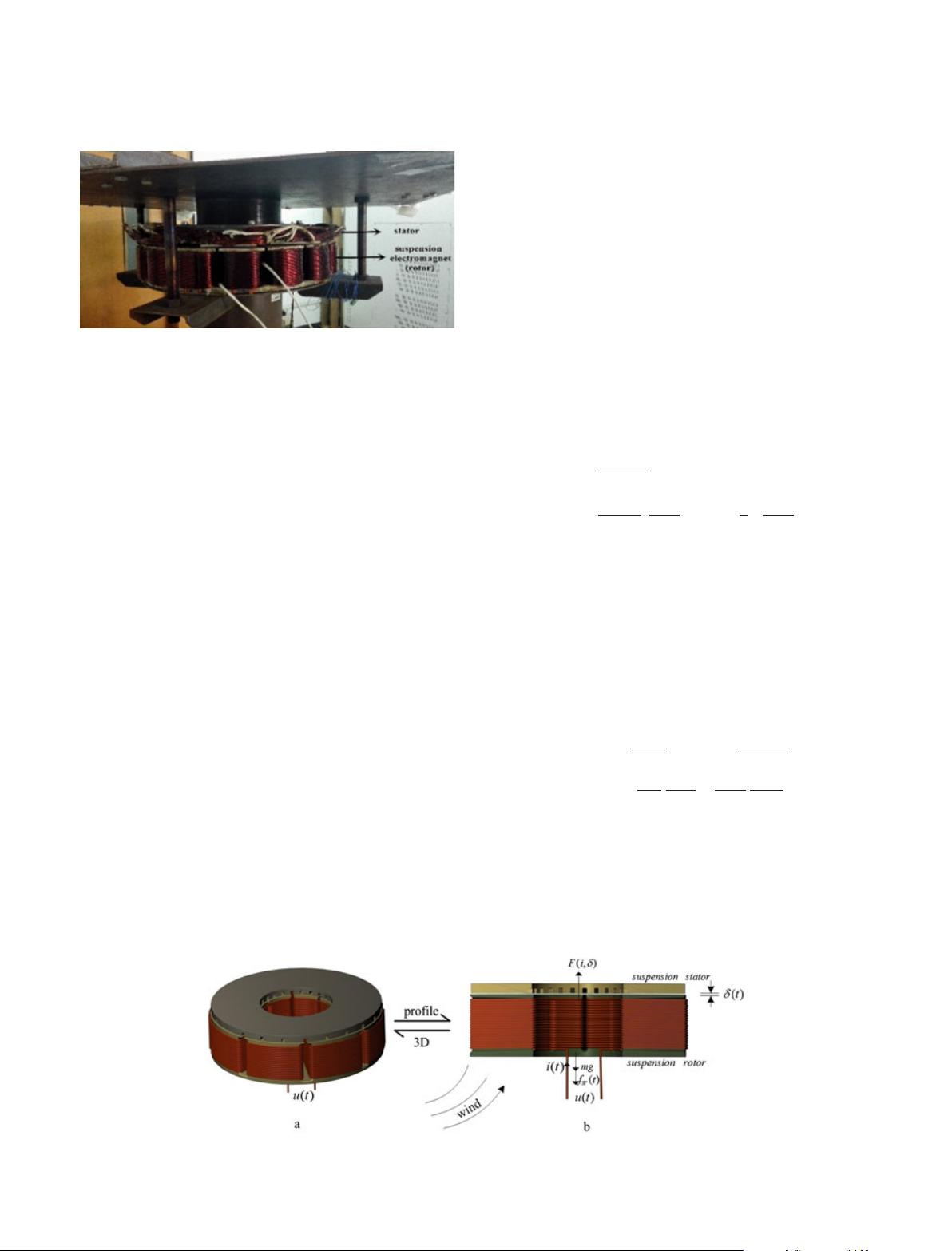
The dynamic suspension model of the MYS is shown
in Fig. 3 where F(i,δ) is the electromagnetic force with up-
ward direction, mg is the gravity of the suspension object
(including the nacelle and suspension electromagnet), f
W
(t)
represents the force caused by crosswind which exerts on
the MYS, δ(t) is the length of suspension air gap, i.e. the
distance between stator and suspension electromagnet, i(t)
and u(t) are the DC exciting current and voltage of the sus-
pension electromagnet, respectively.
As shown in Fig. 3, in the levitating process, th e sus-
pension object will move upward to the equilibrium posi-
tion with the acceleration a =-
€
δ ; and in the landing
process, the suspension object moves down to the rest posi-
tion with the acceleration a=
€
δ, so the mechanical equation
of the MYS in vertical direction for the two processes could
be formulated by the Newton’s second law as:
mg þ f
W
tðÞFi; δðÞ¼m
€
δ
where m is the mass of the suspension object, g is the accel-
eration of gravity.
According to the pri nciple of virtual work, the electro-
magnetic force can be described as:
Fi; δðÞ¼
∂Wi; δ
ðÞ
∂δ
þ f
M
¼
μ
0
N
2
S
4
itðÞ
2
δ tðÞ
2
þ f
M
¼
1
2
k
itðÞ
2
δ tðÞ
2
þ f
M
where W(i,δ) is the magnetic field energy stored in the air
gap, μ
0
is permeability of vacuum, N is coil turns, S is the
effective area of magnetic poles of the suspension electro-
magnet, the unmodeled parts and parameters uncertainty
in MYS can be considered in uncertain internal disturbance
f
M
and k=μ
0
N
2
S/2.
According to the Kirchhoff’s law and Ohm’slaw,we
obtain the exciting voltage equation as:
utðÞ¼Ri tðÞþ
dψ tðÞ
dt
¼ Ri tðÞþ
dLitðÞ½
dt
¼ Ri tðÞþ
k
δ tðÞ
di tðÞ
dt
ki tðÞ
δ
2
tðÞ
dδ tðÞ
dt
where Ψ (t ) is the flux linkage, L is the inductance of sus-
pension electromagnet and L(δ)=k/δ(t), R is the resistance
of coils.
Combining the above equations, the dynamic model
of MYS in the levitating and landing process is given as:
Fig. 2. Prototype of the MYS. [Color figure can be viewed at
wileyonlinelibrary.com]
Fig. 3. Dynamic suspension model of the MYS. [Color figure can be viewed at wileyonlinelibrary.com]
Y. Li et al.: Modeling of Maglev Yaw System and its Robust Control Based on NDOB
© 2018 Chinese Automatic Control Society and John Wiley & Sons Australia, Ltd
剩余12页未读,继续阅读
2019-08-06 上传
2021-09-20 上传
2021-06-12 上传
2022-07-15 上传
2021-04-27 上传
2021-10-08 上传
2021-11-01 上传
2021-04-23 上传

weixin_38682790
- 粉丝: 3
- 资源: 978
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
