FANUC机器人操作手册:入门指南
需积分: 10 55 浏览量
更新于2024-07-17
1
收藏 72.03MB DOC 举报
"FANUC(PSA) MANUAL_入门级(Private).doc"
这篇文档是关于FANUC机器人操作系统PSA的手册,适用于初学者。手册涵盖了机器人手动操作、坐标系系统、I/O信号查看、数据查看、程序管理和界面功能等关键知识点。
一、手动操作
1. 自动手动切换:通过按下AUTO+OFF组合键进入自动模式,T1+ON组合键则切换到手动模式,这对于在生产线上的调试和维护工作非常重要。
2. 单步运行与连续运行切换:通过持续按下“STEP”键可以在单步运行和连续运行之间切换,方便对程序进行逐行调试。
二、坐标系系统说明
1. 三类坐标系:轴坐标系(JOINT)、世界坐标系(WORLD)、工具坐标系(TOOL)以及用户坐标系(USER)。这些坐标系的选择和切换对于精确控制机器人的运动至关重要。
2. 坐标系切换:通过连续按“COORD”键可以在不同坐标系间循环切换。
3. TOOL和USER坐标系选择:结合“SHIFT”和“COORD”键,可以快速选取所需的工具或用户坐标系。
4. 修改查看TOOL和USER坐标系值:在MENU/SETUP/Frames路径下,可以通过“MANU”键来查看和修改TCP(工具中心点)的位置。
三、机器人本体轴和外部轴切换、运动速度更改及I/O信号查看等功能,使得用户可以根据实际需求调整机器人的动作和速度,并监控系统的输入输出状态。
四、PSA标准界面
1. 界面控制按钮和功能按钮,如工具参数配置、备份/恢复、生产状态界面等,提供了丰富的交互手段,方便用户进行各种设置和操作。
五、备份与恢复机制
1. 程序备份与恢复:确保了程序安全,防止因意外导致的数据丢失。
2. 镜像备份与恢复:可以备份整个系统的配置,用于系统故障时的快速恢复。
3. 可读的程序备份:方便程序的共享和移植。
六、常用机器人程序指令和焊钳、端拾器的配置,提供了编写和优化机器人程序的基础,包括焊钳和端拾器的特定参数设置,以适应不同的作业任务。
七、“FCTN”按键功能:可能包含了更多的特殊功能,例如某些特定操作的快捷方式或者系统设置。
这份手册是学习和使用FANUC PSA控制系统的基础指南,涵盖的内容广泛且深入,对于想要掌握FANUC机器人操作的人员来说是必不可少的学习材料。通过熟练掌握这些知识,用户将能够有效地操作和编程FANUC机器人,以实现高效的自动化作业。

FANUC R-2000iB
按下图中所示的“OTHER”键,按方向键选择“User/RTCP”,出现夹具坐标
系界面显示不同夹具的坐标值。
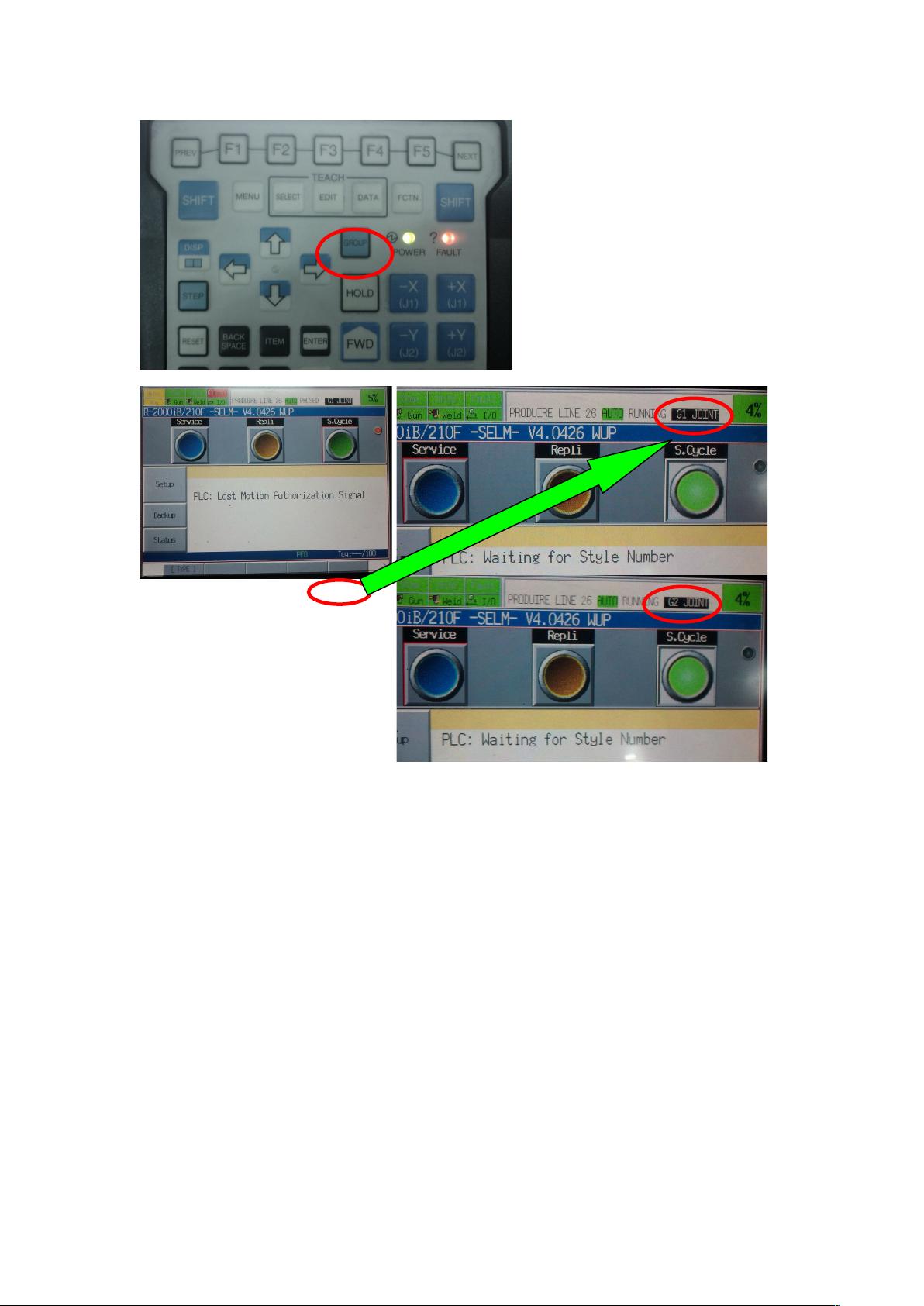
3. 机器人本体轴和外部轴切换
连续按下“GROUP”键,本体轴和外部轴循环切换。
7
剩余38页未读,继续阅读
2021-10-05 上传
2020-12-12 上传
2021-10-10 上传
2022-04-10 上传
2022-07-13 上传
2021-09-30 上传









