使用51单片机驱动MPU6050三轴陀螺仪的LCD1602显示程序
需积分: 50 143 浏览量
更新于2024-09-10
收藏 455KB DOC 举报
"这篇内容是关于InvenSense公司的三轴陀螺仪MPU6050的测试程序,适用于51单片机STC89C52,使用IIC接口与LCD1602显示器进行数据同步显示。程序包含了硬件原理图、IIC通信、加速度计和陀螺仪数据的读取与显示。"
MPU6050是一款集成的六轴惯性测量单元(IMU),包含三轴陀螺仪和三轴加速度计,常用于移动设备、机器人以及无人机等需要姿态检测和运动追踪的系统中。该器件通过IIC(Inter-Integrated Circuit)总线与微控制器通信,简化了系统的硬件设计。
在提供的代码中,可以看到程序首先定义了51单片机P0、P1、P2口的使用,这些口分别被用作LCD1602的数据端口、IIC的时钟(SCL)和数据(SDA)引脚,以及LCD1602的控制引脚。程序还包含了对LCD1602初始化和数据传输的设置,以便于在LCD上显示陀螺仪和加速度计的原始数据。
接着,定义了MPU6050的一些关键寄存器地址,如SMPLRT_DIV、CONFIG和GYRO_CONFIG,这些寄存器用于配置陀螺仪的采样率、低通滤波器以及测量范围。例如,SMPLRT_DIV可以设置陀螺仪的采样率,CONFIG则用于设置低通滤波器的截止频率,以滤除不必要的高频噪声。
GYRO_CONFIG寄存器用于设定陀螺仪的测量范围,例如0x18表示不进行自检且设置最大测量范围为2000deg/s。同样,加速度计的配置也是通过类似的寄存器完成的。
在实际应用中,MPU6050的读取操作通常涉及发送I2C起始信号、选择设备地址、写入寄存器地址、再发送起始信号并读取数据。代码中可能包含了这些步骤,但由于只给出了部分代码,具体实现细节无法完全展现。
通过这个测试程序,用户可以获取到MPU6050的实时测量数据,包括加速度和角速度,这对于开发需要动态姿态跟踪的应用非常有用。然而,为了获得更精确的三维姿态信息,通常还需要结合卡尔曼滤波或互补滤波等算法来融合陀螺仪和加速度计的数据。
MPU6050是一个功能强大的传感器,其与51单片机的集成应用能够实现对设备运动状态的实时监测,并通过LCD1602显示原始数据,为开发者提供了直观的调试手段。在实际项目中,用户可以根据需要调整采样率、滤波器设置,以及根据具体应用的需求处理和解析传感器数据。
InvenSense 公司的三轴陀螺仪 MPU6050 测试程序。IIC 接口,51 单片机驱动,LCD1602 同
步显示。
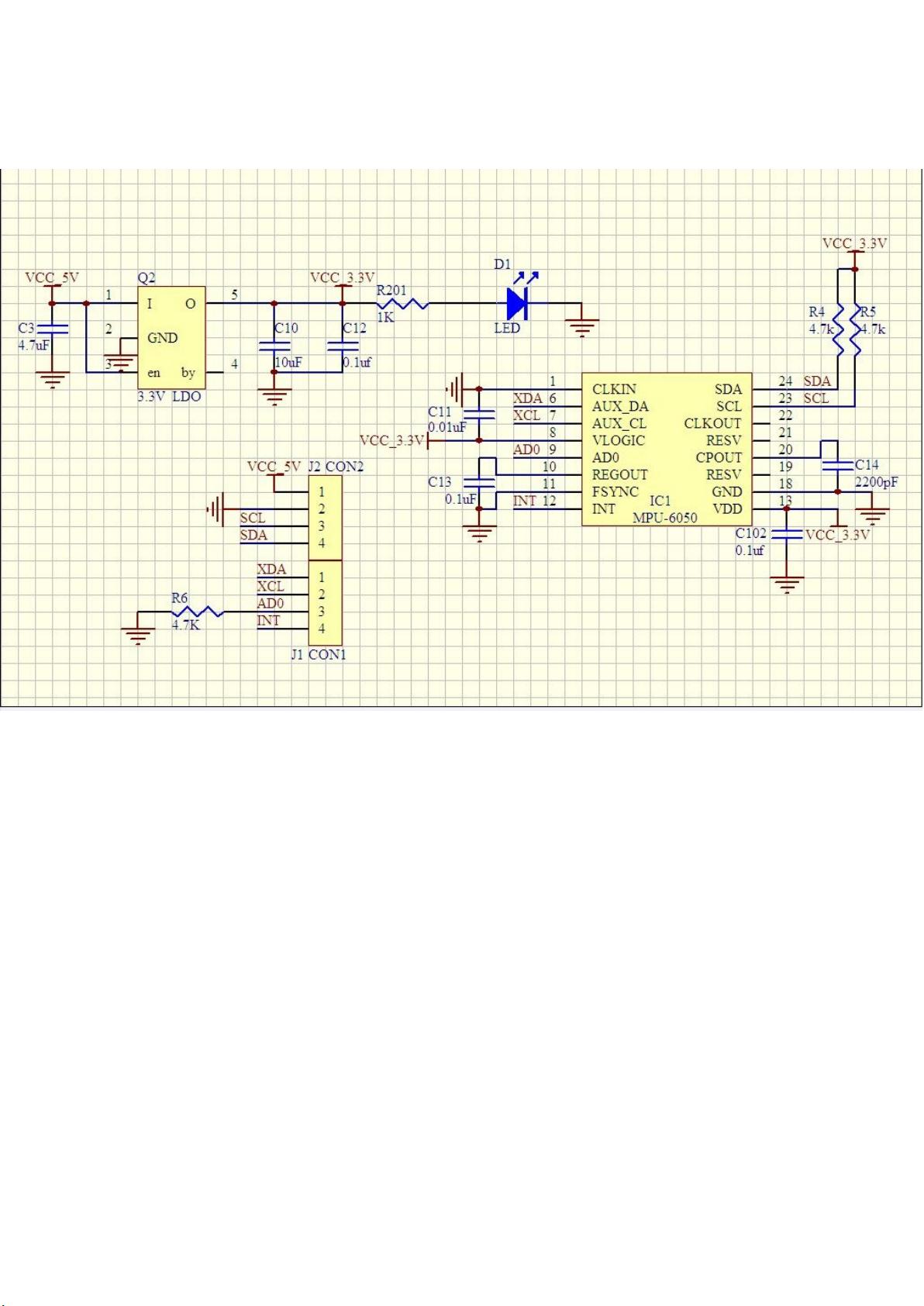
硬件原理图
//****************************************
// MPU6050 IIC 测试程序
// 使用单片机 STC89C52
// 晶振:11.0592M
// 显示:LCD1602
// 编译环境 Keil uVision2
// 参考宏晶网站 24c04 通信程序
// 功能: 显示加速度计和陀螺仪的 10 位原始数据
// 时间:2013 年 3 月 1 日
//****************************************
#include <REG52.H>
#include <math.h> //Keil library
#include <stdio.h> //Keil library
#include <INTRINS.H>
typedef unsigned char uchar;
下载后可阅读完整内容,剩余9页未读,立即下载
2013-07-26 上传
2019-03-01 上传
2018-06-26 上传
2023-09-11 上传
2013-09-05 上传
2013-08-08 上传
2012-12-10 上传
2018-04-06 上传

最爱喝豆奶
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- NIST REFPROP问题反馈与解决方案存储库
- 掌握LeetCode习题的系统开源答案
- ctop:实现汉字按首字母拼音分类排序的PHP工具
- 微信小程序课程学习——投资融资类产品说明
- Matlab犯罪模拟器开发:探索《当蛮力失败》犯罪惩罚模型
- Java网上招聘系统实战项目源码及部署教程
- OneSky APIPHP5库:PHP5.1及以上版本的API集成
- 实时监控MySQL导入进度的bash脚本技巧
- 使用MATLAB开发交流电压脉冲生成控制系统
- ESP32安全OTA更新:原生API与WebSocket加密传输
- Sonic-Sharp: 基于《刺猬索尼克》的开源C#游戏引擎
- Java文章发布系统源码及部署教程
- CQUPT Python课程代码资源完整分享
- 易语言实现获取目录尺寸的Scripting.FileSystemObject对象方法
- Excel宾果卡生成器:自定义和打印多张卡片
- 使用HALCON实现图像二维码自动读取与解码
