控制系统数学模型:从微分方程到传递函数
需积分: 11 83 浏览量
更新于2024-07-30
收藏 729KB PDF 举报
"该资源详细探讨了连续时间控制系统的数学模型和设计,涵盖了从微分方程模型到状态方程,再到传递函数、方块图、信号流图等多种建模方法,以及各种数学模型之间的转换关系。"
在控制系统设计中,连续性是一个至关重要的概念,因为它直接影响着系统的稳定性和性能。连续时间控制系统的数学模型是理解和设计此类系统的基础。本资料首先介绍了如何通过微分方程来描述系统的动态行为,列举了多个实际系统(如R-L-C电路、机械动力学系统、直接蒸汽加热器和汽车控制系统)作为建模的例子,并详细讲解了如何列写微分方程以及微分方程的特征。
接着,资料深入讨论了状态空间建模,包括状态变量的选择(物理量或相变量)以及状态方程的建立。状态空间模型能够更全面地描述系统的行为,有助于进行控制设计。此外,还涵盖了特殊特性的建模,如纯滞后、分布参数、积分、高阶特性以及非线性特性的线性化处理。
控制系统的其他关键组件,如控制器(PID和MAC)、测量元件(测速发电机和热电阻)以及执行机构的数学模型也得到了阐述。这些组件的模型对于理解整个系统的行为至关重要。
然后,资料讲解了传递函数和方块图,这是分析线性系统常用的方法。传递函数提供了系统的频率响应信息,而方块图则方便了系统分析和综合。同时,还介绍了信号流图和梅逊增益公式,这是一种用于计算系统增益和反馈路径的工具。
最后,资料讨论了不同数学模型之间的转换,包括如何从微分方程求解状态方程,从状态方程得到传递函数,以及通过状态变换保持系统特征值的不变性。这些转换能力使得工程师可以根据实际情况选择最适合的建模方法。
这份资料详尽地阐述了连续时间控制系统的数学建模和分析,为理解和设计复杂控制系统提供了坚实的理论基础。无论是初学者还是经验丰富的工程师,都能从中受益匪浅。
12
3.相似系统
定义:如果描述两个系统动态特性的微分方程式具有相同的形式,就称它们为相似系统,
在微分方程中处于相同位置的物理量称为相似量。
现将例 2-1a 的 RLC 串联系统与例 2-3 的弹簧-质量-阻尼器串联系统进行比较:
)()(
)()(
2
2
tetv
dt
tdv
RC
dt
tvd
LC
c
cc
=++
(2-6)
)(
1
2
2
tF
k
y
dt
dy
k
b
dt
yd
k
m
=++
(2-27)
显然,这两个方程具有相同的形式,称它们是相似系统。为更清楚地说明问题,试作一变量
代换,令
C
q
v
c
= ,即将例 2-1a 的电路系统以电量 q 为输出量,则式(2-6)变为
)()(
1)()(
2
2
tetq
Cdt
tdq
R
dt
tqd
L =++
(2-6’)
再比较式(2-27)与(2-6’),相似系统的性质更加明显,且可以很容易地找出 RLC 串联电
路系统与机械系统之间的对应相似量,如表
2-1 中的机械系统与电路系统 I 所示。
表 2-1 相似系统的相似量
机械力学系统
F(t) m B k
位移
y 速度 v
RLC 电路系统 I
e(t) L R 1/C q i
相似电路系统 II
i(t) C 1/R 1/L
电压
v
相似系统的概念在系统分析与实践中很有用,因为某种系统可能比另一种系统更容易
进行分析或进行实验研究。
注:由于对电路系统的研究比较透彻,实验起来也方便,所以往往利用相似系统的概念采用电路系统
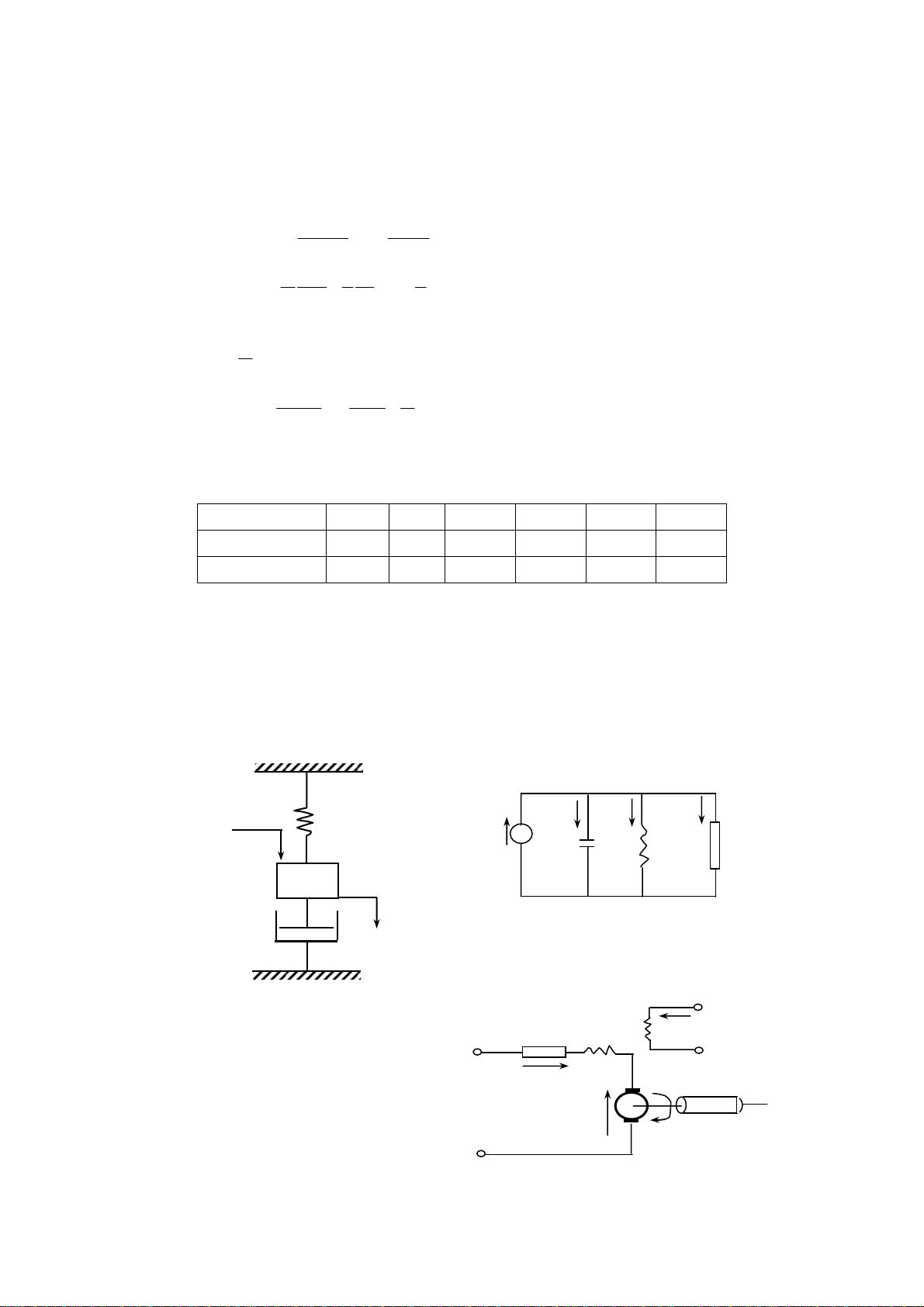
来模拟其他物理系统,称这类电路为模拟电路。例如,例 2-3 的弹簧-质量-阻尼器串联系统(图 2-4)可
以直接采用如图 2-8 所示的电路系统进行模拟实验,了解其动态性能。由图可知。若将这两个系统视作相
似系统的话,相似量为表 2-1 中的第 3 行,标注为相似电路系统 II。
三、更多的动态系统建模举例
本小节试图再通过 2 个实例来说明建
模过程中的一些共性问题。
1. 电枢控制直流电机
[
例 2-6] 列写如图 2-9 所示电枢控制的
m
F(t)
k
y(t)
b
图 2-4
简单机械系
统
示
意图
R
图 2-8 图 2-4 的相似电路系统示意图
i
(
t
)
i
0
i
1
i
2
R
a
图 2-9 电枢控制的直流电动机系统示意图
u
a
(
t
)
i
a
(
t
)
L
a
+
-
E
a
(
t
)
I
f
=常数

剩余66页未读,继续阅读
2021-08-07 上传
110 浏览量
710 浏览量
291 浏览量
2021-02-23 上传
120 浏览量
点击了解资源详情
115 浏览量
点击了解资源详情

AAwoshilpf
- 粉丝: 1
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- smnm1989.github.io
- 家庭会计系统:个人理财系统
- 欧智博德 17.600 G 不锈钢传感器 移动液压设备.zip
- KEY_DISPLAY.7z
- STM32F103ZET6原理图及pcb-电路方案
- marys-kitchen:一家餐厅的网站
- QRSYS_Server
- 基于HTML实现的简单的卫浴企业静态网站模板源码(css+html+js+图样).zip
- 2020-B-:2020年“华为杯”数学建模Q2的过滤器—包装程序及Q4的优化过程主要代码
- csv-to-sqlite:一个将CSV文件转换为SQLite数据库的桌面应用程序!
- ReportBuilder.zip
- NET探秘:MSIL权威指南.rar
- basic-api-server
- WeatherApp:Nodejs,Expressjs,OpenweathermapAPI和EJS视图引擎中的小型天气应用
- salesource-translate
- 基于C语言实现直流电机(含源代码+使用说明).zip
