使用移动最小二乘法的图像变形算法详解
需积分: 50 47 浏览量
更新于2024-10-07
收藏 786KB PDF 举报
"本文主要介绍了一种基于移动最小二乘法(Moving Least Squares, MLS)的图像变形处理算法,该方法适用于不同的线性变换类别,包括仿射、相似和刚体变换。通过这些变形,可以实现对图像的逼真操控,让用户感觉像是在操作真实世界中的物体。此外,用户可以选择用点集或线段来指定变形,特别适合于控制图像中的曲线和轮廓。每种技术都提供了简单的封闭形式解,能够快速地实现变形,且可以在实时环境中执行。"
在计算机图形学领域,图像变形处理是一种重要的技术,它允许我们改变图像的几何形状,以模拟各种效果,如物体的运动、变形或者艺术风格的变化。二次插值算法是其中一种常用的方法,它通过插值来估计新位置上的像素值,以保证图像的平滑过渡。
本论文提出的图像变形方法基于移动最小二乘法,这是一种优化技术,用于找到一个函数,使得该函数在一组数据点上的平方误差之和最小。在图像变形应用中,这一方法能够确保变形后的图像保持较高的质量和自然感。论文展示了使用仿射、相似和刚体变换进行变形的效果,这三种变换分别对应于更广泛的线性变换类型,从基本的平移和旋转(刚体变换)到比例和旋转(相似变换),再到更复杂的扭曲和缩放(仿射变换)。
为了提高用户的控制度和灵活性,该方法允许用户通过设定控制点或线段来定义变形。控制点可以精确地调整局部变形,而线段则适合于沿着图像中的曲线或边缘进行变形。通过提供简单的封闭形式解,该算法能够快速计算出新的像素位置,使得实时变形成为可能,这对于交互式应用程序和动画制作尤其有价值。
此外,论文还涉及了计算机图形学中的几个关键概念,如边界表示、曲线、曲面和对象表示。这些概念是构建和操作三维模型的基础,它们在图像变形中扮演着核心角色,因为图像可以被视为二维表面的边界表示,而变形过程就是对这个表面进行操作。
这项工作为图像变形提供了一个高效且灵活的工具,不仅在学术研究中具有重要意义,也对游戏开发、电影特效、虚拟现实等工业应用有着广泛的应用前景。通过结合不同类型的线性变换和用户控制机制,该算法能够在保持图像质量的同时,实现各种复杂的视觉效果。
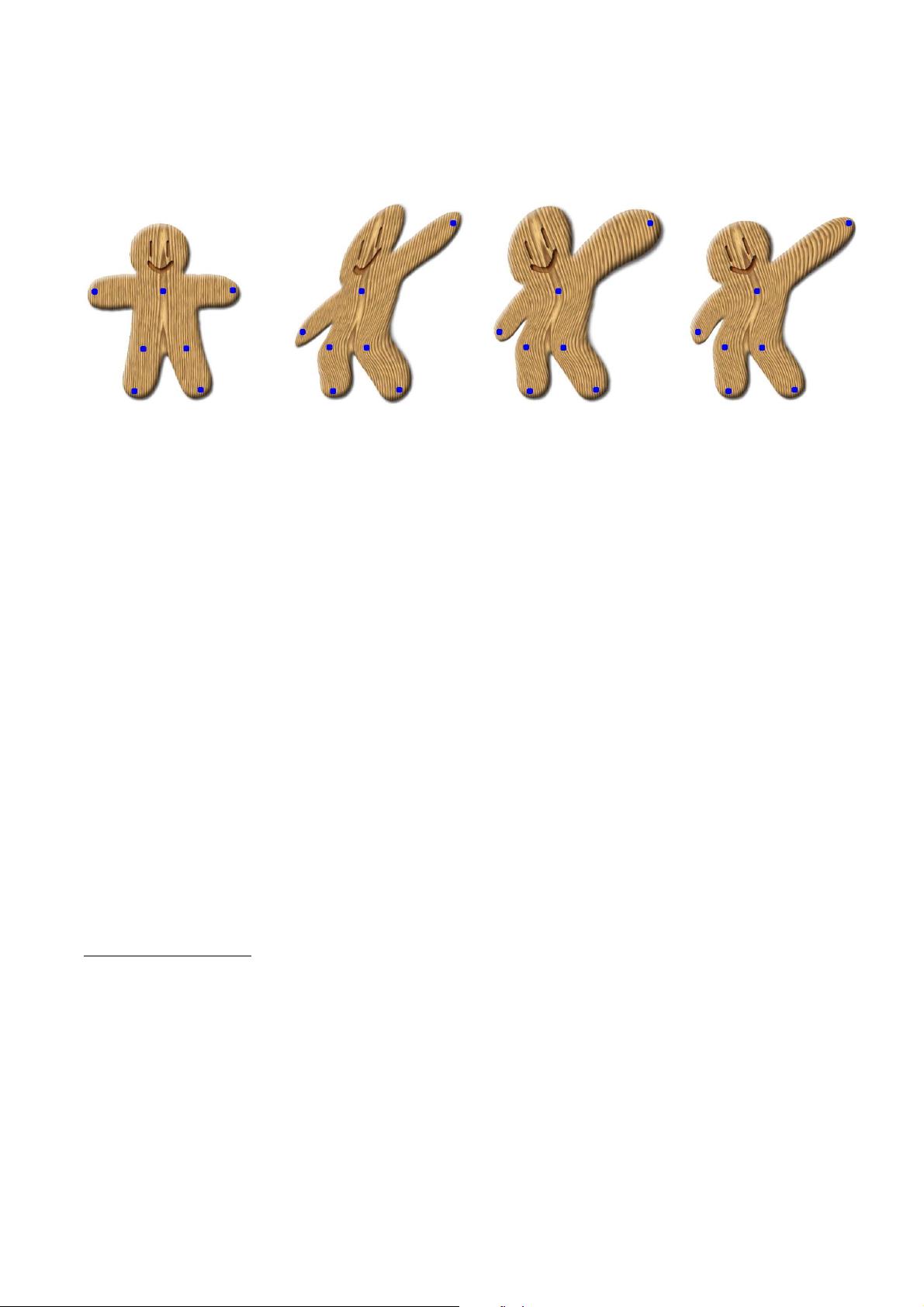
Image Deformation Using Moving Least Squares
Scott Schaefer
∗
Texas A&M University
Travis McPhail
†
Rice University
Joe Warren
‡
Rice University
(a) (b) (c) (d)
Figure 1: Deformation using Moving Least Squares. Original image with control points shown in blue (a). Moving Least Squares deforma-
tions using affine transformations (b), similarity transformations (c) and rigid transformations (d).
Abstract
We provide an image deformation method based on Moving Least
Squares using various classes of linear functions including affine,
similarity and rigid transformations. These deformations are real-
istic and give the user the impression of manipulating real-world
objects. We also allow the user to specify the deformations using
either sets of points or line segments, the later useful for control-
ling curves and profiles present in the image. For each of these
techniques, we provide simple closed-form solutions that yield fast
deformations, which can be performed in real-time.
CR Categories: I.3.5 [Computer Graphics]: Computational Ge-
ometry and Object Modeling—Boundary representations; Curve,
surface, solid, and object representations; Geometric algorithms,
languages, and systems
Keywords: Deformations, moving least squares, rigid transforma-
tions
1 Introduction
Image deformation has a number of uses from animation, to mor-
phing [Smythe 1990] and medical imaging [Warren et al. 2003].
To perform these deformations the user selects some set of han-
dles to control the deformation. These handles may take the form
of points [Bookstein 1989], lines [Beier and Neely 1992], or even
polygon grids [MacCracken and Joy 1996]. As the user modifies
∗
email: sschaefe@rice.edu
†
email:tjice@rice.edu
‡
email:jwarren@rice.edu
the position and orientation of these handles, the image should de-
form in an intuitive fashion.
We view this deformation as a function f that maps points in the
undeformed image to the deformed image. Applying the function
f to each point v in the undeformed image creates the deformed
image. Now consider an image with a set of handles p that the user
moves to new positions q. For f to be useful for deformations it
must satisfy the following properties:
• Interpolation: The handles p should map directly to q under
deformation. (i.e; f (p
i
) = q
i
).
• Smoothness: f should produce smooth deformations
• Identity: If the deformed handles q are the same as the p, then
f should be the identity function. (i.e; q
i
= p
i
⇒ f (v) = v).
These properties are very similar to those used in scattered data
interpolation. The first two properties simply state that the func-
tion f interpolates the scattered data values and is smooth. The last
property is sometimes referred to as linear precision in the approxi-
mation field. It states that if data is sampled from a linear function,
then the interpolant reproduces that linear function. Given these
similarities, it comes as no surprise that many deformation meth-
ods borrow techniques from scattered data interpolation.
Previous Work
Previous work on image deformation has focused on specify-
ing deformations using different types of handles. Grid-based
techniques such as free-form deformations [Sederberg and Parry
1986; Lee et al. 1995] parameterize the image using bivariate cubic
splines to create C
2
deformations. Typically these methods require
aligning grid lines corresponding to the control points of the spline
with features of the image, which can be cumbersome for the user.
Beier et al. [Beier and Neely 1992] improve upon these grid-
based techniques and allow the user to specify the deformation
using sets of lines. This method is based on Shepard’s inter-
polant [Shepard 1968] and creates smooth deformations. However,
the authors note that their method produces complicated warps that
下载后可阅读完整内容,剩余7页未读,立即下载
2021-05-30 上传
2010-11-01 上传
2008-10-20 上传
2018-09-04 上传
2012-04-11 上传
2021-09-29 上传
2009-10-12 上传
2009-11-01 上传

tan_huizhen
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







