基于GPS/IMU集成导航数据的FMCW SAR潜水加速度成像方法
22 浏览量
更新于2024-08-29
收藏 316KB PDF 举报
"Imaging Method of FMCW SAR With Diving Acceleration Based on GPS/IMU Integrated Navigation Data"
本文是一篇研究论文,主要探讨了利用GPS/IMU集成导航数据进行FMCW(频率调制连续波)SAR(合成孔径雷达)成像的方法,特别是在平台具有潜水加速度条件下的应用。FMCW SAR技术结合了频率调制和合成孔径雷达的优势,能够实现轻量化、高分辨率的成像系统。
在FMCW SAR系统中,雷达发射连续波信号,其频率随时间线性变化,通过测量回波信号与发射信号之间的频差(多普勒频移),可以获取目标的距离和速度信息。然而,当SAR平台存在潜水加速运动时,传统的成像算法可能无法准确处理这种复杂运动模式导致的额外距离和速度误差。
文章中,作者提出了一种新的成像方法,该方法利用平台上的GPS/IMU(全球定位系统/惯性测量单元)集成导航设备来获取高阶近似的运动参数。这些参数包括平台的位置、速度以及由于潜水加速引起的附加运动信息。通过将这些参数引入到目标范围表达式中,可以更精确地描述目标相对于雷达的位置变化。
关键在于使用了系列反演算法,该算法用于在多普勒频率域中评估接收到的信号的精确表达式。这一算法能够有效地处理由潜水加速度引入的复杂动态,从而提高成像的精度和质量。
为了验证所提方法的有效性,文章进行了仿真分析。仿真结果表明,提出的FMCW SAR成像方法在考虑潜水加速度情况下,能有效减少成像误差,提高图像的质量和分辨率,对于在潜水加速运动中的目标探测具有显著优势。
关键词:FMCW SAR;GPS/IMU;潜水加速度;系列反演算法
这篇论文贡献了一种新的SAR成像技术,特别是在处理具有潜水加速度的平台运动时,能够提供更准确的成像结果,这对于航空、航天以及海洋监测等领域的应用具有重要的理论和实践意义。
978-1-4799-4195-7/14/$31.00©2014IEEE
Imaging Method of FMCW SAR With Diving
Acceleration Based on GPS/IMU Integrated
Navigation Data
De-wei Wu, Ying Liang, Jun-yi Qi, Meng Zhu
Institute of Information and Navigation, Air Force
Engineering University
Xi’an 710077, People’s Republic of China
E-mail: wudewei74609@126.com
You-qing Bai
Institute of Science, Air Force Engineering University
Xi’an 710051, People’s Republic of China
Abstract—This paper presents an imaging method of
FMCW SAR with diving acceleration. The motion parameters
measured by the GPS/IMU integrated navigation device on the
platform are used for constructing the target range expression
in high-order approximation. The
series reversion
algorithm is used to evaluate the accurate expression of
the received signal in Doppler frequency domain.
The
simulation is presented to show the effectiveness of the
proposed method.
Keywords—FMCW SAR; GPS/IMU; diving acceleration;
series reversion algorithm
I. INTRODUCTION
The combination of frequency-modulation continuous-
wave (FMCW) technology and synthetic aperture radar
(SAR) promises a lightweight, cost-effective, and high-
quality imaging sensors [1]. Therefore, the FMCW SAR is
best applied to the small unmanned aerial vehicle (SUAV)
and missile-borne platform [2-3]. In this paper, the issue of
signal characteristic of FMCW SAR during its diving flight
is concerned. The geometric and target range expression are
built, and to ensure the imaging quality, the range
expression need to be constructed as 4-order approximation
about slow-time. The motion parameters measured by the
GPS/IMU integrated navigation device on the platform are
used for motion compensation. Finally, a new imaging
method for FMCW SAR with diving acceleration is
proposed. Simulations are presented to show the
effectiveness of the proposed method.
II. E
CHO SIGNAL MODEL AND IMAGING METHOD
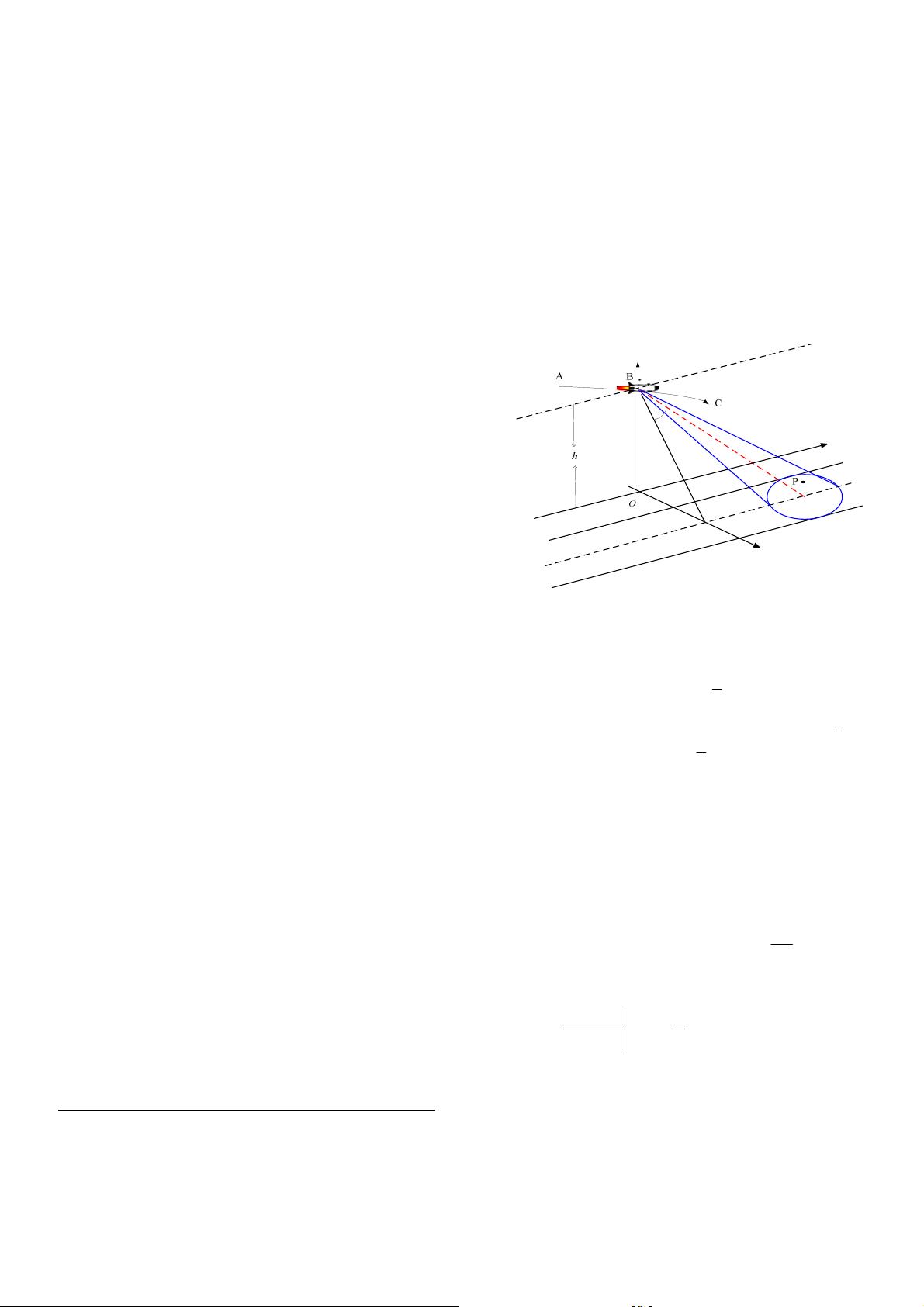
Without loss of generality, the FMCW SAR geometry
with diving acceleration is depicted in Fig.1.
q
A
BC is the
trajectory of the platform, and the projection on the ground
is the X-axis.
()
0, , 0h are the coordinates of B. P denotes
one point target located at the scene with coordinate of
()
00
,,0XY .
B
R
0
R
0
θ
X
Y
Z
Fig. 1. Geometric model of FMCW SAR with diving acceleration
The instantaneous range from P to the radar is
() ( ) ()
()
()
2
2
0
1
2
2
2
2
0
1
,
2
1
2
km x k m x k m
zk m zk m
Rt t X v t t a t t
hvt t at t Y
⎛
⎛⎞
=−+− +
⎜
⎜⎟
⎜
⎝⎠
⎝
⎞
⎛⎞
++ + + + +
⎟
⎜⎟
⎟
⎝⎠
⎠
(1)
where
k
t is the fast time,
m
t is the slow time,
x
v and
x
a are
the velocity and acceleration on the X-axis direction,
z
v and
z
a are the velocity and acceleration on the Z-axis direction.
The velocity and acceleration are measured by the
GPS/IMU integrated navigation device on the platform.
Then (1) can be written in 4-order approximation about
m
t :
()
01 0
0
23 4
234
,sin
z
km x m
mmmk
vh
R
tt R v t
R
tttt
μθ
μμμα
⎛⎞
=+ − +
⎜⎟
⎝⎠
+++ +
(2)
where
()
0
,
2
k
km
a
k
t
dR t t
f
dt
λ
α
=
==−, and
This work is supported by the National Natural Science Foundation of
China under grant 61273048 and 61172169.
下载后可阅读完整内容,剩余4页未读,立即下载
244 浏览量
115 浏览量
2021-02-13 上传
2021-02-09 上传
115 浏览量
156 浏览量
2021-02-07 上传
109 浏览量
2021-02-10 上传

weixin_38582685
- 粉丝: 4
- 资源: 925
 我的内容管理
展开
我的内容管理
展开







最新资源
- frontend_engineers_must_know:使用Vanilla Javascript构建的辅助项目
- sota-onboarding:使用Heroku云平台的最先进的检测和入门应用程序
- matlab代码sqrt-R-spaceship-tracking:利用预测控制模型(可以实施)跟踪漂移的飞船,以证明基本控制系统
- PhoDibaLab_REM_HiddenMarkov模型:在Kamran Diba实验室对2021年冬季我的轮换做的分析
- Python-Kmeans
- matlab数据读入和fft变换程序简单实用
- 友基手写板驱动 v1.4.0 最新版
- hai_vu78,matlab实训 源码,matlab源码之家
- 的words:一个本机应用程序,可尝试使用NativeScript-Vue构建的what3words API
- drag-n-drop-taskboard:https
- 学习技术
- matlab有些代码不运行-KCF:“带内核相关过滤器的高速跟踪”的源代码
- sipml5-master.zip
- 简洁购物商城.zip
- moviedatabase
- jei_jn36,matlab中的fit函数源码,matlab源码网站
