AB plc 控制系统指令详解:从LOGIX5550到PID调整
需积分: 50 131 浏览量
更新于2024-07-25
收藏 8.3MB PDF 举报
"该文档是关于AB plc (Allen-Bradley) 控制系统的指令手册,主要涉及了多种逻辑和算术运算指令,用于优化和管理自动化控制流程。"
在AB plc系统中,指令集是其核心组成部分,这些指令用于编写控制逻辑,实现设备的自动化操作。以下是部分重要的AB plc指令及其功能解释:
1. **LOGIX5550** - 这可能是Allen-Bradley Logix系列PLC的一个型号,提供了强大的处理能力和灵活性,用于复杂控制应用。
2. **ACS** - 可能代表“加速计控制”或类似的含义,用于处理与加速度相关的数据或控制。
3. **LEQ** - "小于等于" 比较指令,用于判断一个数值是否小于或等于另一个数值。
4. **ADD** - 加法指令,用于将两个数值相加。
5. **LES** - "小于" 比较指令,用于判断一个数值是否小于另一个数值。
6. **NEG** - 取负指令,用于改变数值的符号,将正数变为负数,负数变为正数。
7. **AFI** - 可能是"绝对值函数",用于计算数值的绝对值。
8. **LFL** - "低于并保持" 指令,用于检测一个输入信号是否低于设定点并持续一段时间。
9. **NEQ** - "不等于" 比较指令,用于判断两个数值是否不相等。
10. **AND** - 逻辑与指令,用于执行位逻辑运算,只有当所有输入均为真时,输出才为真。
11. **LFU** - "高于并保持" 指令,与LFL相反,检测输入信号是否高于设定点并保持。
12. **NOP** - "无操作" 指令,通常用于填充程序或作为占位符。
13. **ASN** - "赋值" 指令,用于将一个数值或变量的值赋给另一个。
14. **LIM** - "限制" 指令,用于限制变量的值在指定范围内。
15. **NOT** - 逻辑非指令,用于反转输入的布尔值。
16. **ATN** - 可能是"反正切"函数,用于计算角度。
17. **LN** - 自然对数函数,计算e(自然对数底)的指数。
18. **ONS** - "开启动作",可能用于启动某个过程或设备。
19. **AVE** - "平均" 函数,用于计算一组数值的平均值。
20. **LOG** - 对数函数,用于计算数值的对数。
21. **OR** - 逻辑或指令,只要有一个输入为真,输出就为真。
22. **BRK** - "中断" 指令,用于停止或中断程序的执行。
23. **MAAT** - "马达启动时间",可能涉及到电机启动的延时控制。
24. **OSF** - "溢出故障",可能用于检测数值是否超过最大范围。
25. **BSL** - "左移" 指令,用于将位向左移动。
26. **MAHD** - "马达最高点",可能与电机的极限位置有关。
27. **OSR** - "溢出恢复",可能用于处理溢出情况后的恢复操作。
28. **BSR** - "右移" 指令,与BSL相反,将位向右移动。
29. **MAFR** - "马达频率响应",可能与电机的频率控制相关。
30. **OTE** - "输出使能",用于开启或关闭输出。
31. **BTD** - "向下计数" 指令,用于减法计数操作。
32. **MAG** - "磁力" 或 "磁性",可能在磁性传感器应用中使用。
33. **OTL** - "输出低",设置输出到低电平。
34. **BTW** - "在...之间",可能用于判断数值是否在指定范围内。
35. **MAH** - "马达高点",与MAHD相似,可能用于电机位置控制。
36. **OTU** - "输出高",设置输出到高电平。
37. **BTW(MSG)** - 带有消息的"在...之间",可能在超出范围时触发特定消息。
38. **MAJ** - "马达关节",可能与机器人或多关节运动控制有关。
39. **PID** - "比例-积分-微分"控制器,用于自动调节系统参数。
40. **CLR** - "清除" 指令,用于清零或初始化变量。
41. **MAS** - "马达设置",可能用于配置电机参数。
42. **RET** - "返回" 指令,用于从子程序或中断服务返回到主程序。
43. **COS** - 余弦函数,计算角度的余弦值。
44. **MASD** - "马达设置差异",可能与电机调校或误差分析相关。
45. **RTO** - "重置时间",可能用于定时器的复位操作。
46. **CPT** - "计数" 指令,用于增加或减少计数器的值。
47. **MASR** - "马达设置读取",用于获取电机的配置信息。
48. **SBR** - "子程序调用",用于执行子程序。
49. **CTD** - "向下计数到零",当计数值减到零时触发。
50. **MDF** - "马达故障",可能用于检测电机的异常状态。
51. **SQI** - "平方根逆",可能用于求一个数的倒数平方根。
52. **DDT** - "差分" 指令,用于计算两个数值之间的差。
53. **MCR** - "电机控制寄存器",用于存储电机控制信息。
54. **SQL** - "平方根" 指令,用于计算数值的平方根。
55. **DEG** - "度",可能用于角度转换或计算。
56. **MDO** - "马达数据输出",用于传输电机相关的数据。
57. **SQO** - "平方" 指令,用于计算数值的平方。
58. **DIV** - "除法" 指令,用于执行除法运算。
59. **MDR** - "马达数据读取",用于从电机接收数据。
60. **SRT** - "排序" 指令,用于对数组进行排序。
61. **EQU** - "等于" 比较指令,用于判断两个数值是否相等。
62. **MDW** - "马达数据写入",用于向电机发送数据。
63. **SSV** - "安全停止值",可能用于紧急停机功能。
64. **FAL** - "失败",可能用于错误或故障检测。
65. **MEQ** - "模等于",用于进行模运算后的比较。
66. **STD** - "停止" 指令,用于停止当前的操作或过程。
67. **FBC** - "浮点数比较",用于比较浮点数值。
68. **MGPS** - "马达速度",可能用于监控电机速度。
69. **SUB** - "减法" 指令,用于执行减法运算。
70. **FFL** - "快速下限",可能用于快速达到下限值的操作。
71. **MGS** - "马达组",可能用于组织电机的控制逻辑。
72. **TAN** - 正切函数,计算角度的正切值。
73. **FFU** - "快速上限",与FFL相反,用于快速达到上限值。
74. **MGSD** - "马达速度差异",可能用于监测速度变化。
75. **TND** - "正切逆",用于计算角度值。
76. **FLL** - "故障保持",可能用于在故障发生时保持当前状态。
77. **MGSP** - "马达速度设置",用于设置电机速度。
78. **TOD** - "时间日期",可能用于处理时间相关的操作。
79. **FOR** - "循环" 指令,用于创建循环结构。
80. **MGSR** - "马达速度读取",用于获取电机速度信息。
81. **TOF** - "时间到",用于检测是否到达预设的时间点。
82. **FRD** - "频率读取",可能用于获取信号的频率信息。
83. **MOV** - "移动"
1-2
1756-6.4.1 November 1999
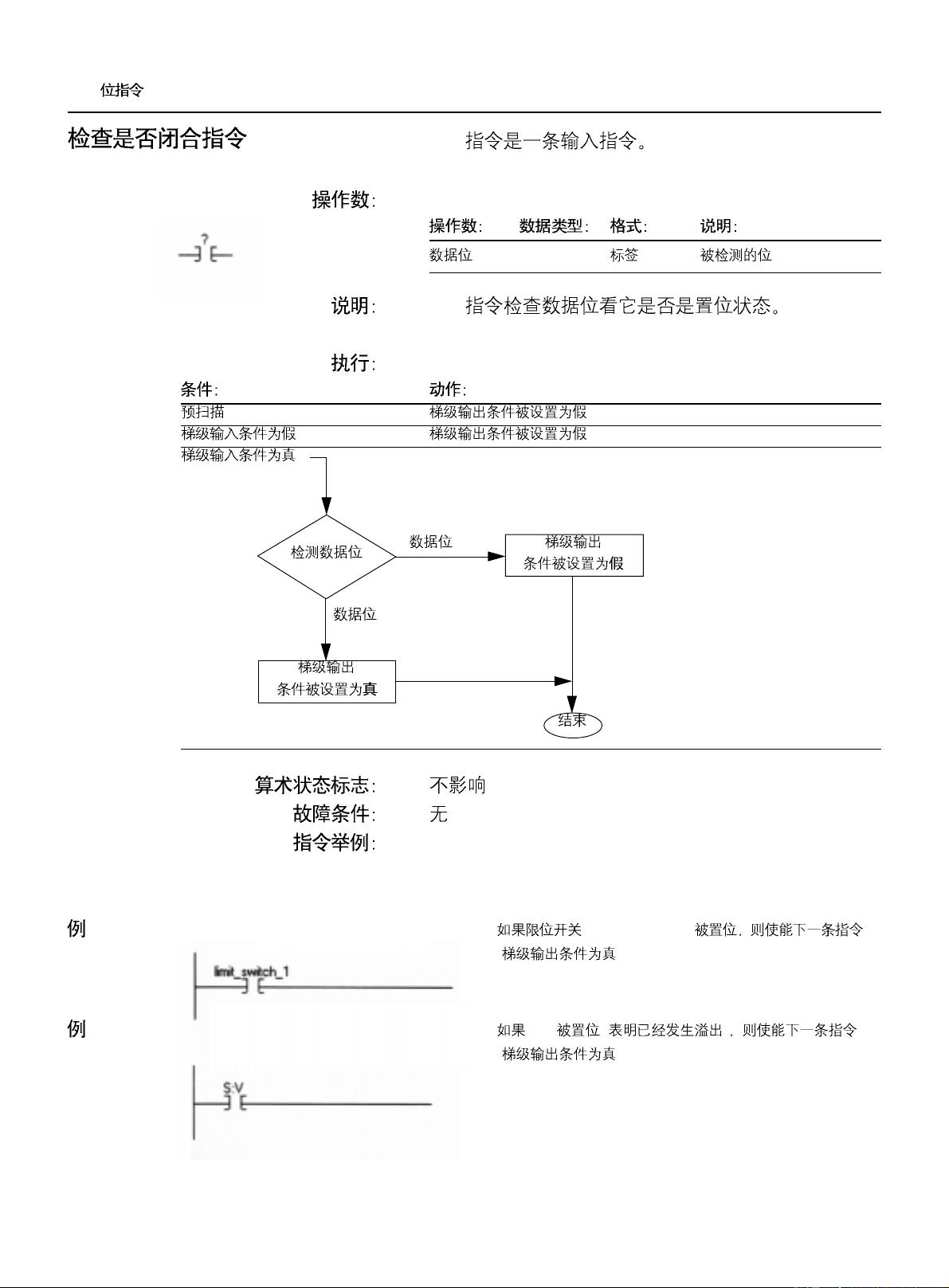
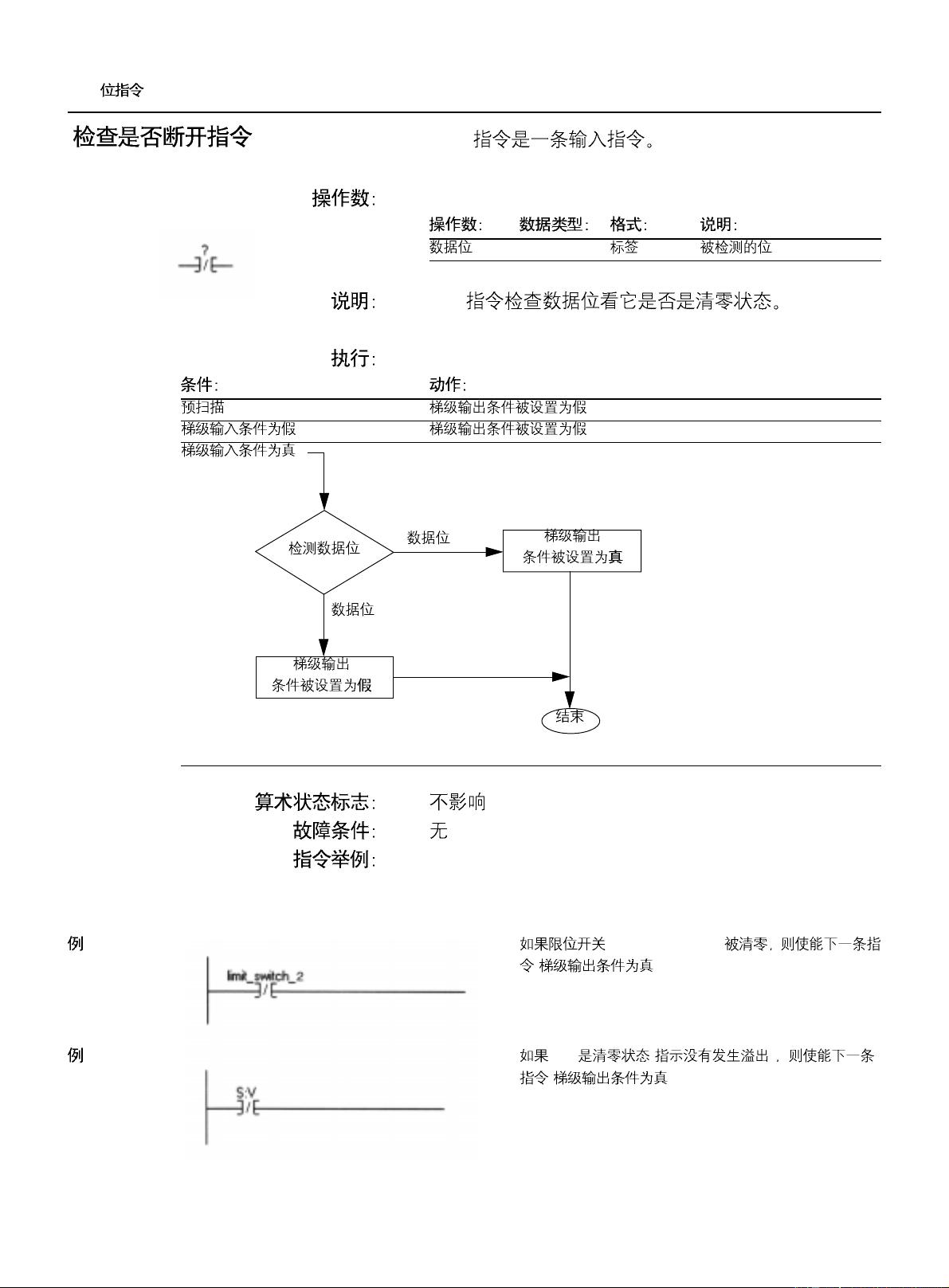
(XIC) XIC
BOOL
XIC
XIC
1 1
(limit_switch_1)
( )
2
S:V
( )
( )
= 0
= 1
剩余360页未读,继续阅读
1252 浏览量
234 浏览量
135 浏览量
996 浏览量

weienqing
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Cisco Catalyst 2950/2955交换机配置指南
- 深入理解Apache Velocity
- Oracle JDeveloper 中的 Ajax 技术应用
- eBox-2300 Windows CE 6.0 开发指南:从零开始到实战应用
- C语言面试经典题解析:数据结构与算法实战
- 电脑发展史:从起源到新时代
- C/C++面试经典问题与技巧解析
- Oracle数据库函数详解
- IBM GPFS:高性能并行文件系统
- Progete教程:进阶操作与OWL数据库
- Protege新手入门:创建简单动物本体与基础用法教程
- 嵌入式开发:安全C/C++编码策略与实践
- 千万别用传统方式学英语:独特学习法揭秘
- 提升C语言上机调试效率的关键技巧
- 网上论坛BBS系统设计与功能详解
- SQL Server 2000:数据库开发与操作实践
