单片机控制单轴双轮自动平衡小车设计
194 浏览量
更新于2023-12-30
收藏 484KB DOCX 举报
本设计论文是以"单片机控制单轴双轮自动平衡小车设计"为题目,属于电气工程及其自动化专业,学号为空。该设计采用了基于ARM CORTEX-M3内核的STM32单片机,旨在使平衡车的姿态调整速度更快,数据处理更准确,运动性能更佳。相较于传统的两轮自平衡车,本设计摒弃了分别采用陀螺仪和加速度传感器来获取小车姿态信息的做法,而直接...
由于其特有的灵活性和便捷性,两轮自平衡车在日常生活中作为代步工具被越来越多的人接受与应用。然而,传统的两轮自平衡车存在姿态调整速度慢、数据处理不够精准和运动性能不佳等问题。针对上述问题,本设计采用STM32单片机来控制单轴双轮自动平衡小车,以提高其姿态调整速度、数据处理精准度和运动性能。
首先,本设计选择了基于ARM CORTEX-M3内核的STM32单片机作为控制核心,与传统的控制方式相比,STM32单片机具有响应速度快、处理能力强、运行稳定等优势,能够更好地满足平衡车在运动过程中对控制的实时性和精准度的要求。
其次,为了获取小车的姿态信息,本设计并没有采用传统的陀螺仪和加速度传感器,而是选择了一种更为直接的方法来获取姿态信息,从而减少了传感器的复杂度和成本。通过这种方法,不仅可以更准确地获取小车的姿态信息,还可以提高系统的稳定性和可靠性。
最后,在控制算法方面,本设计充分利用了STM32单片机的强大计算能力和丰富的外设资源,设计了一套高效稳定的控制算法,以实现平衡车的自动平衡和精准控制。同时,为了提高平衡车的运动性能,本设计还对电机驱动部分进行了优化,使平衡车在各种复杂环境下都能够正常行驶。
综上所述,本设计论文采用了基于ARM CORTEX-M3内核的STM32单片机,通过直接获取姿态信息、优化控制算法和电机驱动部分等手段,设计了一种性能更佳的单轴双轮自动平衡小车。该设计不仅可以提高平衡车的姿态调整速度和数据处理精准度,还能够显著提高平衡车的运动性能,为相关领域的研究和应用提供了一种新的思路和方法。
中原工学院信息商务学院毕业设计(论文)
2
��
0a �t
��
�� �� ��
tLatatg
dt
t
L ���
�
�
2
2
d
��
�� ��
tLatg
dt
t
L ��
�
�
2
2
d
2 平衡车总体设计方案
2.1 系统平衡原理分析
分析双轮平衡小车的平衡站立,我们自然联想到一根直立木棍在手指上保持直
立,这正是人们在日常生活中对直立平衡控制的直观经验和感受。通过仔细分析不
难发现,通过手指移动可以保持木棍的直立不倒,类比于单轴双轮平衡小车,我们
在发现车身倾斜的时候,需要直接使车子向相反的方向运动,目的是抵消在这个维
度上由于车身重力产生的倾斜,这样就能使车身保持直立平衡。导致车体倾斜的主
要因素是θ角度
[3]
的产生,θ角度是车身发生倾斜后车身和垂直于地面的直线的夹
角,所以要想小车平衡,需要消除倾角,或将倾角控制在一个可控的范围之内,整
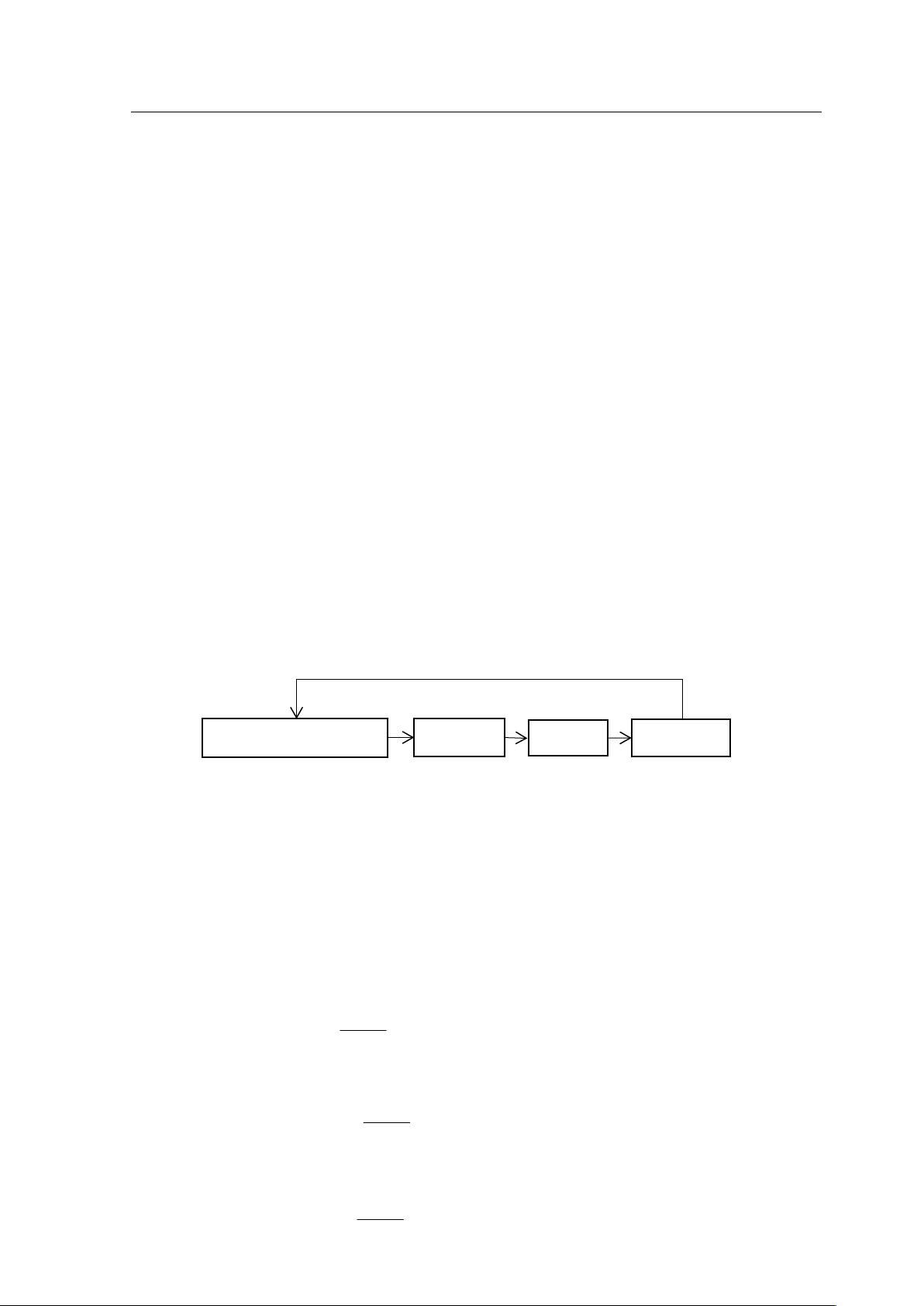
个平衡控制流程如图 2-1 所示。
图 2-1 平衡控制框图
保持车身平衡的方法是转动电机来调整车身下部,以改变车身倾斜角度,来使
车身保持在一水平垂直线上。然而这只是我们的直观感受,真正应用于理论设计的
时候,就要写出小车的运动方程
[4]
。车身受力分析如图 2-2 所示。
车模运动方程:
(2-1)
在 角 度 θ 很 小 时,运动方程简化为:
(2-2)
车模静止时:
��
��
� �
�� ��
� �
ccossin
d
2
2
��� ttatg
dt
t
L
��
�
θ不为零车体倾斜
转动车
轮
车体平衡
θ变
小
剩余34页未读,继续阅读
179 浏览量
201 浏览量
267 浏览量
223 浏览量
2023-07-08 上传
2023-07-02 上传

zzzzl333
- 粉丝: 814
- 资源: 7万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 电子功用-方形电池侧焊夹具
- 基于NB-IoT的温室大棚环境监测系统 农业大棚监测控制系统 智慧农业(使用STM32开发板,仅电子资料)
- 禅道项目管理软件ZenTaoPMS v12.5.1
- 机器学习中的公平性【卡内基梅隆大学-CMU】.zip
- jQuery-Slider:完成了自定义jQuery滑块的集成,以集成到Omni-Update的TTUISD的OU校园CMS中
- 云
- Windows Communication Foundation 和 Builder NE 类型安全 API:“MATLAB 艺术”帖子的代码 - 如何使用 Builder NE 构建 Web 服务。-matlab开发
- اصالت سنج نماد اعتماد الکترونیکی-crx插件
- IPA-Ablage:IPA Dies ist eine weitere Ablagefürdie Dokumente von meiner
- 购买电视剧版权合约书
- keil MDK仿Vscode主题配色
- 毕业设计选题系统
- jetbrains-academy:JetBrains学院解决方案
- roms:光盘
- HSP
- ECG_Viewer:Matlab GUI,用于检查,处理和注释心电图(ECG)数据文件
