双模糊离散事件系统分散诊断研究
126 浏览量
更新于2024-08-28
收藏 1.07MB PDF 举报
"基于状态的双模糊离散事件系统分散诊断"
这篇研究论文探讨了双模糊离散事件系统(BFDESs)的状态分散诊断问题。BFDESs是一种更适应高不确定性系统的模型,相比传统的离散事件系统(DESs)和模糊离散事件系统(FDESs),它能更好地刻画复杂的不确定环境。
在论文中,作者Weilin Deng和Daowen Qiu首先引入了基于状态的分散诊断框架。这一框架对于理解和处理大型、复杂系统中的故障诊断至关重要,因为它允许将诊断任务分解到各个子系统中,降低了整体的计算复杂性。
接下来,他们定义了“基于状态的共诊断能力”(state-based co-diagnosability)这一概念。这是评估系统能否通过分散的方式检测和识别全局故障的关键。论文提供了基于状态的共诊断能力的必要且充分条件,这对于系统设计和诊断策略的制定具有指导意义。
为了实现这一诊断能力,作者提出了一个多项式时间的算法,用于验证系统是否具备基于状态的共诊断能力。这个算法的高效性使得在实际应用中快速检查系统诊断性能成为可能。此外,他们还提出了一种在线的分散诊断方法,这种方法允许系统在运行时动态地进行故障检测。
进一步,论文介绍了一个紧凑的基于状态的分散诊断框架,并定义了“基于状态的联合诊断能力”(state-based jointly diagnosability)。这一概念关注的是系统中各部分如何协同工作,以共同识别和隔离故障。随之提供了一个验证这种诊断能力的算法,确保了系统能够在分布式环境中有效地进行故障诊断。
这篇论文对BFDESs的故障诊断理论进行了深入研究,提供了新的分析工具和算法,这些对于设计和分析具有高不确定性的复杂系统,特别是在实时监控和故障恢复方面,具有重要的理论和实践价值。
856 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 25, NO. 4, AUGUST 2017
and Karnik [41] defined the union (∪), intersection (∩) and
complements (¯) operations of T2 FSs as follows:
ˆ
A ∪
ˆ
B =
x∈X
μ
ˆ
A∪
ˆ
B
(x)/x, where μ
ˆ
A∪
ˆ
B
(x)
= μ
ˆ
A
(x) μ
ˆ
B
(x)
=
u
w
(μ
ˆ
A
(x, u) ∧ μ
ˆ
B
(x, w))/(u ∨ w),
ˆ
A ∩
ˆ
B =
x∈X
μ
ˆ
A∩
ˆ
B
(x)/x, where μ
ˆ
A∩
ˆ
B
(x)
= μ
ˆ
A
(x) μ
ˆ
B
(x)
=
u
w
(μ
ˆ
A
(x, u) ∧ μ
ˆ
B
(x, w))/(u ∧ w),
¯
ˆ
A =
x∈X
μ
¯
ˆ
A
(x)/x, where μ
¯
ˆ
A
(x)
=
u
μ
ˆ
A
(x, u)/(1 − u).
Here, ∨ and ∧ denote max operation and min operation,
respectively. and defined in fuzzy degrees are called as join
and meet, respectively.
As the generalized T1 fuzzy relation, a T2 fuzzy relation is
defined as follows.
Definition 2: Let X and Y be two universes of discourse.
Then,
ˆ
R = {[(x, y),μ
ˆ
R
(x, y)] | (x, y) ∈ X × Y } (4)
is a binary T2 fuzzy relation in the product space X × Y . Here,
μ
ˆ
R
(x, y) ∈ NCFD denotes the fuzzy degree of (x, y) belonging
to
ˆ
R.LetNCFD
X × Y
denote the set of all T2 fuzzy relations in
the product space X × Y . Then,
ˆ
R ∈ NCFD
X ×Y
with |X| =
m and |Y | = n can also be expressed as an m ∗ n matrix in
which the elements belong to NCFD.
Suppose that
ˆ
R ∈ NCFD
X ×Y
and
ˆ
S ∈ NCFD
Y ×Z
with
|X| = m, |Y | = n and |Z| = k. Then, the composition of
ˆ
R and
ˆ
S is denoted by the m ∗ k matrix
ˆ
R
ˆ
ˆ
S, in which the elements
are obtained by the following meet-join operation:
ˆ
R
ˆ
ˆ
S(x, z)=
y ∈Y
[
ˆ
R(x, y)
ˆ
S(y, z)],x∈ X, z ∈ Z. (5)
By combining classical DESs theory and T2 FSs theory, we
introduce the BFDESs model as follows.
Definition 3: A bi-fuzzy DES is modeled as a bi-fuzzy au-
tomaton, which is a four-tuple:
ˆ
G = {
ˆ
X,
ˆ
Σ,
ˆ
δ, ˆx
0
}.
Here,
ˆ
X is a set of bi-fuzzy states over a crisp state set X with
|X| = n. A bi-fuzzy state ˆx ∈
ˆ
X is denoted by a row vector
{˜x
1
, ˜x
2
,...,˜x
n
}, where ˜x
i
∈ NCFD represents the fuzzy
degree of the system being at the crisp state x
i
.
ˆ
Σ is a set of
bi-fuzzy events. Any ˆσ ∈
ˆ
Σ is denoted by a matrix ˆσ =[˜a
ij
]
n∗n
with ˜a
ij
∈ NCFD. ˜a
ij
denotes the fuzzy transition degree
from state x
i
to x
j
when event ˆσ occurs. δ :
ˆ
X ×
ˆ
Σ →
ˆ
X is
a transition function, which is defined by
ˆ
δ(ˆx, ˆσ)=ˆx
ˆ
ˆσ for
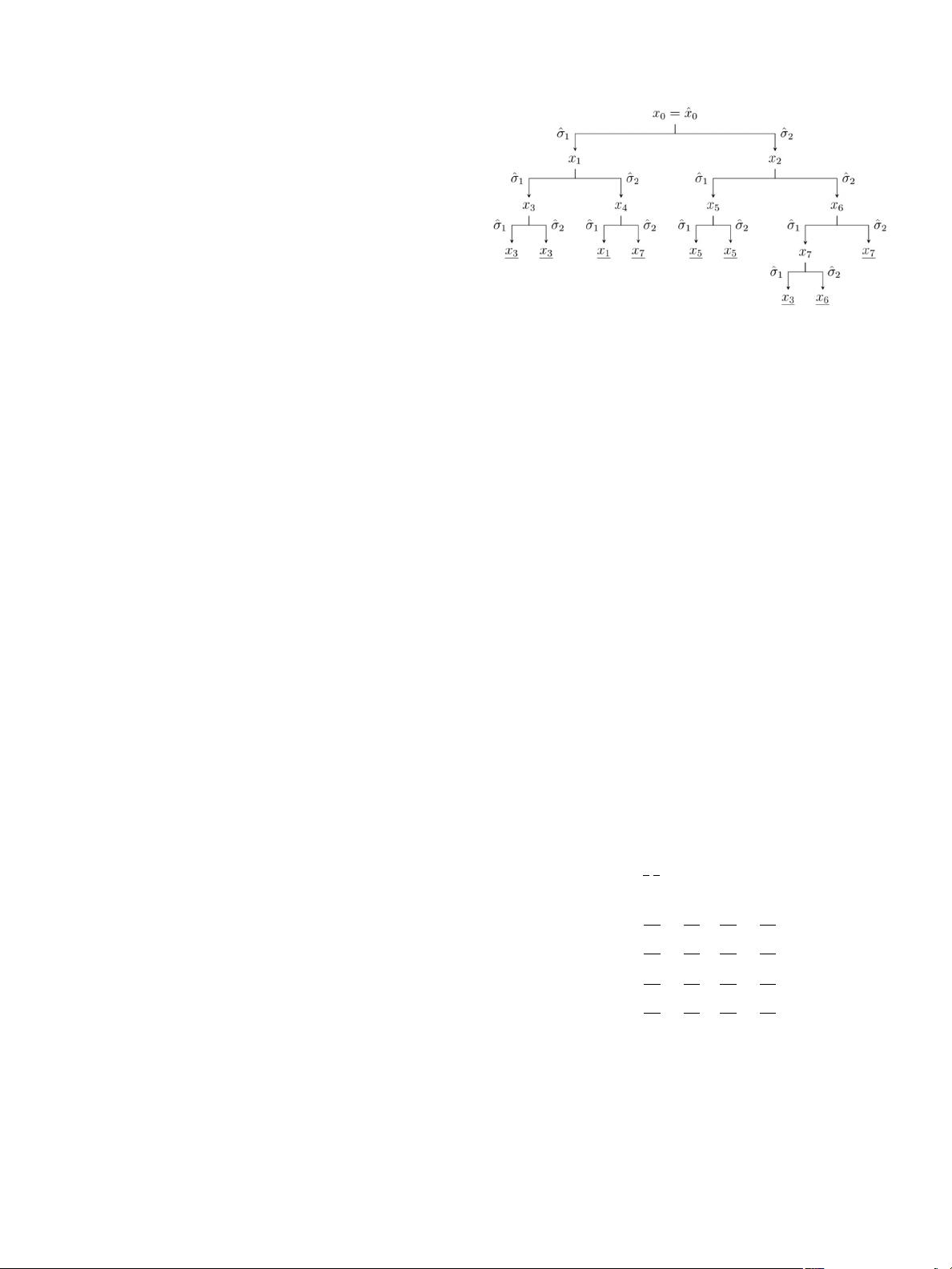
Fig. 2. Computing tree of the BFDES
ˆ
G.
ˆx ∈
ˆ
X and ˆσ ∈
ˆ
Σ.“
ˆ
” denotes the meet-join operation defined
in (5). ˆx
0
=[˜x
0,1
, ˜x
0,2
,...,˜x
0,n
] is a bi-fuzzy initial state,
where ˜x
0,i
∈ NCFD is the fuzzy degree of the crisp state x
i
belonging to initial states.
BFDESs model can directly handle some fuzzy and uncertain
data, whereas FDESs model have to defuzzify these data in
the modeling phase. We have presented an example in [23] to
demonstrate this case. The example also revealed the fact that
sometimes it is much better to process fuzzy data directly than to
defuzzify them too early. Hence, BFDESs have well advantages
over FDESs in some cases.
In general, a BFDES has an infinite states. However, only its
accessible part is our concern. In [23], we provided a method
to obtain the accessible states of a BFDES by constructing a
computing tree. The computing tree is constructed as follows.
The root is labeled by ˆx
0
. Each vertex, labeled by ˆx
0
ˆ
ˆs,may
produce n’s sons vertices labeled by ˆx
0
ˆ
ˆs
ˆ
ˆσ
1
, ˆx
0
ˆ
ˆs
ˆ
ˆσ
2
, ...,
ˆx
0
ˆ
ˆs
ˆ
ˆσ
n
, respectively. If a vertex whose label is equal to that
of anther nonleaf vertex, then it is a leaf and marked by an under-
line. The computing ends with a leaf at the end of each branch.
Then, the labels of the tree vertices contain all the accessible
states. In [23], we have demonstrated that the accessible states
of the BFDESs is finite, if we specify a finite J
x
to NCFD.
Example 1: Let the BFDES
ˆ
G = {
ˆ
X,
ˆ
Σ,
ˆ
δ, ˆx
0
} be a predict-
ing model of a certain clinical testing. For ˆx =(ˆx
1
, ˆx
2
) ∈
ˆ
X,
ˆx
1
(ˆx
2
) denotes the measure of the first (second) physiological
parameter. Here, ˆx
0
=[
1
1
1
0
] is the initial s tate.
ˆ
Σ={ˆσ
1
, ˆσ
2
} is
the events set. Each of the events denotes a certain therapy, and
ˆσ
1
1
=
1
0.6
+
0.6
0.9
1
0.9
+
0.8
1
1
0.3
+
0.7
0.6
1
0.3
+
0.7
0.6
ˆσ
1
2
=
1
0.3
+
0.7
0.6
1
0.8
+
0.7
0.9
1
0.9
+
0.8
1
1
0.6
+
0.6
0.9
are the corresponding matrices of ˆσ
1
and ˆσ
2
in
ˆ
G, respectively.
Each of these matrices summarizes the effects for the physio-
logical parameters when adopting the corresponding therapy.
We obtain the computing tree (as shown in Fig. 2), and get the
accessible states of
ˆ
G (as shown in Table I). Then, the accessible
part of BFDES
ˆ
G can be easily obtained (as shown in Fig. 3),
which can be viewed as an effective predicting model of the
clinical testing.
剩余13页未读,继续阅读
2021-03-08 上传
点击了解资源详情
点击了解资源详情
2024-10-31 上传
2024-10-31 上传
2024-10-31 上传
2024-10-31 上传

weixin_38514805
- 粉丝: 9
- 资源: 932
 我的内容管理
展开
我的内容管理
展开







最新资源
- IEEE 14总线系统Simulink模型开发指南与案例研究
- STLinkV2.J16.S4固件更新与应用指南
- Java并发处理的实用示例分析
- Linux下简化部署与日志查看的Shell脚本工具
- Maven增量编译技术详解及应用示例
- MyEclipse 2021.5.24a最新版本发布
- Indore探索前端代码库使用指南与开发环境搭建
- 电子技术基础数字部分PPT课件第六版康华光
- MySQL 8.0.25版本可视化安装包详细介绍
- 易语言实现主流搜索引擎快速集成
- 使用asyncio-sse包装器实现服务器事件推送简易指南
- Java高级开发工程师面试要点总结
- R语言项目ClearningData-Proj1的数据处理
- VFP成本费用计算系统源码及论文全面解析
- Qt5与C++打造书籍管理系统教程
- React 应用入门:开发、测试及生产部署教程
