高速寻线机器人:单片机与摄像头技术应用
需积分: 10 105 浏览量
更新于2024-09-28
收藏 305KB DOC 举报
"摄像头等相关设计参考资料"
本资源主要探讨了基于摄像头设计的高速寻线机器人,其设计思路和硬件实现,特别适用于对速度有高要求的智能汽车大赛等竞赛项目。文章详细介绍了车体机械设计、硬件电路设计以及摄像头在寻线系统中的应用。
1. 车体机械设计部分,采用了后轮驱动、前轮转向的布局,以适应高速转向的需求。这种设计可以减少对电机同步控制的复杂性,提高运动的稳定性。前轮通过舵机驱动,后轮由直流电机传动,结合机械差速机构防止转向打滑。车体结构紧凑,摄像头安装在车体前部高处,以获取更广阔的视野,为高速寻线提供更准确的信息。
2. 硬件电路设计中,核心控制器选择了Freescale公司的MC9S12DG128单片机,它具有高性能、高性价比的特点。这款单片机能处理38MHz的指令时钟,16MHz的A/D转换器用于视频采集。它还集成了PWM通道、捕捉/比较通道、串行通信接口和大量的IO端口,能有效控制舵机、电机,接收编码器脉冲信号,并进行无线调试。单片机内部的128k flash存储空间足以存储视频数据,简化了系统设计。
3. 视频采集模块选择了低分辨率的黑白摄像头,这是考虑到单片机A/D转换速度的限制。低分辨率摄像头能够实现实时处理,满足高速寻线的要求。图像数据通过单片机进行处理,实现对路线的预判,这也是视觉方案相对于光电传感器在速度上的优势。
这份参考资料深入讲解了如何利用摄像头进行高速寻线机器人的设计,包括机械结构优化、电子硬件选型以及系统集成。对于想要从事或研究摄像头应用、机器人控制以及智能汽车设计的读者来说,是一份宝贵的参考资料。
基于视觉的高速寻线机器人设计与实现
时间:2009-03-05 14:35:58 来源:中国传动网 作者:关军 杨明
在最近一些机器人竞赛中,对于机器人的寻线行走,除了要求精确之外,对机
器人寻线速度也提出了很高的要求,速度往往成为某些比赛制胜的关键。在最近教
育部推出的全国大学生智能汽车大赛中,更是将寻线速度定为比赛的主题。本文在
总结参加此类赛事的基础上,提出了一种将单片机作为核心控制器,利用低分辨率
摄像头代替通用光电传感器的机器人高速寻线行走机构设计方法。
1 车体机械设计
为了体现速度要求,采用仿真赛车模型作为车体机械平台。采用后轮驱动,
前轮转向的工作方式,实现高速转向运动;而如果采用两轮式结构,通过双电机差
速方式实现的转向运动,在高速转向情况下,对电机同步控制要求很高,难以实现。
前轮转向采用舵机驱动,后轮驱动通过直流电机传动到后轮轴,利用机械差速机构
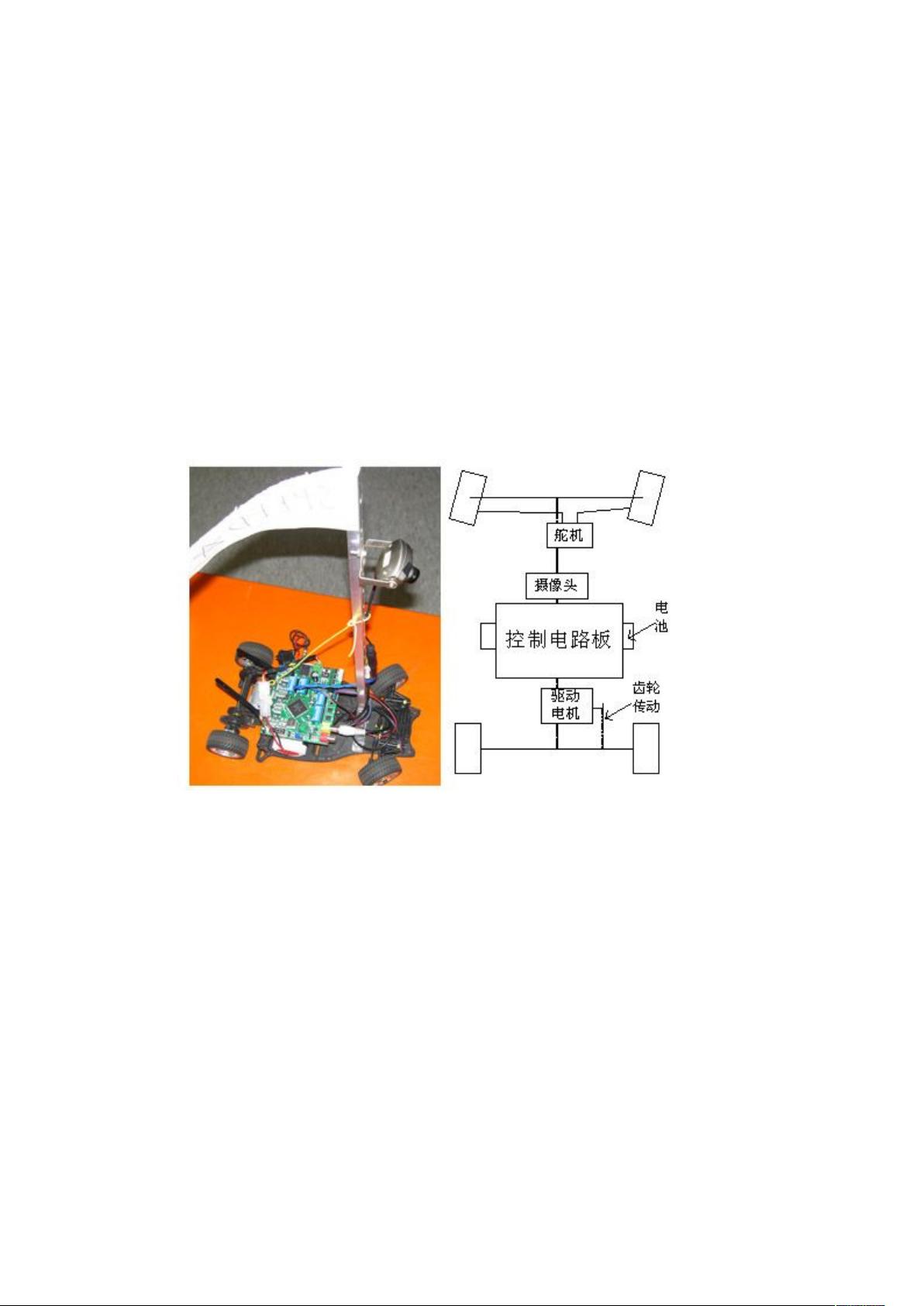
避免转向打滑。其各主要部件安装位置如图 1 所示。
图 1 车体实物及结构示意图
机器人采用摄像头作为寻线传感器,为了使摄像头获得很好的前方视野,
将摄像头安装在车体前部高处,从而捕获车体前方足够丰富的路线信息,实现线路
预判,这是视觉方案在寻线速度上大大优于光电传感器方案的关键。
2 硬件电路设计
这里主要介绍作为核心控制器的单片机性能以及视频采集模块电路结构,
简要介绍其他模块硬件实现。系统整体结构如图 2 所示:
下载后可阅读完整内容,剩余4页未读,立即下载
110 浏览量
194 浏览量
点击了解资源详情
2022-01-27 上传
209 浏览量
124 浏览量
2016-01-22 上传
102 浏览量
2022-01-27 上传

goldishzi139
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Developmentment-school-template-:这是开发学校的静态网站
- 应用之间调用(iPhone源代码)
- Web Clipper Beta-crx插件
- FastDFS集群安装所需要的所有文件
- marklogic-workpapers:MarkLogic MEAN 堆栈应用程序
- Facebook登录页面复制
- simon:没有意义的游戏
- cp-database:编码海盗
- 易语言画心形画苹果形示爱程序-易语言
- scrcpy-win64-v1.14.zip
- Highcharts多个图表共用一个提示框,每个图表多条曲线
- Frosmo Preview-crx插件
- raxy:简单的状态管理器
- strudra:在Python中使用Ghidra结构
- GoStack-02Fundamentos-NodeJS-Desafio05:针对存储库模式的应用在NodeJS中的应用
- IP3_ALB
