Matlab相机标定:2/3参数导出XML教程与代码
88 浏览量
更新于2024-08-28
收藏 556KB PDF 举报
在MATLAB中进行相机标定并导出XML文件时,一个重要的步骤是确定使用的径向畸变参数数量。通常情况下,相机标定过程会提供两个基本的径向畸变系数(k1和k2),因为它们可以很好地描述大部分情况下的镜头畸变。然而,某些高级相机或特殊镜头可能需要额外的第三个径向畸变系数(k3)来精确校正。
在开始生成XML文件之前,你需要决定是使用两个参数还是三个参数。如果选择两个参数,MATLAB提供了`writeExternalandIntrinsicMatrix`函数,用于将相机参数转换为XML格式。该函数的核心部分包括以下步骤:
1. 创建一个XML文档结构:
- 使用`com.mathworks.xml.XMLUtils.createDocument`创建一个名为'opencv_storage'的文档节点。
- 创建根节点`docRootNode`,作为XML文档的基础。
2. 构建相机参数:
- 将内参矩阵(IntrinsicMatrix)作为一个元素添加到文档中,使用`createElement`创建一个名为'IntrinsicCam'的节点,并设置其类型为'opencv-matrix'。
- 创建子节点`rows`,表示矩阵的行数,这里设定为3(代表3x3的矩阵,包含焦距、畸变系数等信息)。
3. 存储径向畸变和附加信息:
- 如果只使用两个径向畸变系数(k1和k2),`TangentialDistortion`通常为零,因此只存储k1和k2。
- 对于第三个径向畸变系数(k3),如果存在,将其值设为0,因为此处假设是二参数模型。
4. 写入XML文件:
- 使用`writeXML`或自定义函数将整个XML结构写入到指定的文件中,如`'cameraParams622.xml'`。
如果你需要包含第三个径向畸变系数,只需修改`Distortion`数组的构造方式,将k3的值加入即可。这将确保XML文件包含了完整的相机参数,以便后续在其他系统或应用中使用。
总结来说,MATLAB中的相机标定过程中,通过`writeExternalandIntrinsicMatrix`函数,你可以根据实际需求选择是导出包含两个或三个径向畸变参数的XML文件。XML文件结构清晰地组织了内参矩阵、畸变系数以及焦距等关键参数,这对于与其他软件或硬件接口至关重要。
如何基于如何基于matlab相机标定导出相机标定导出xml文件文件
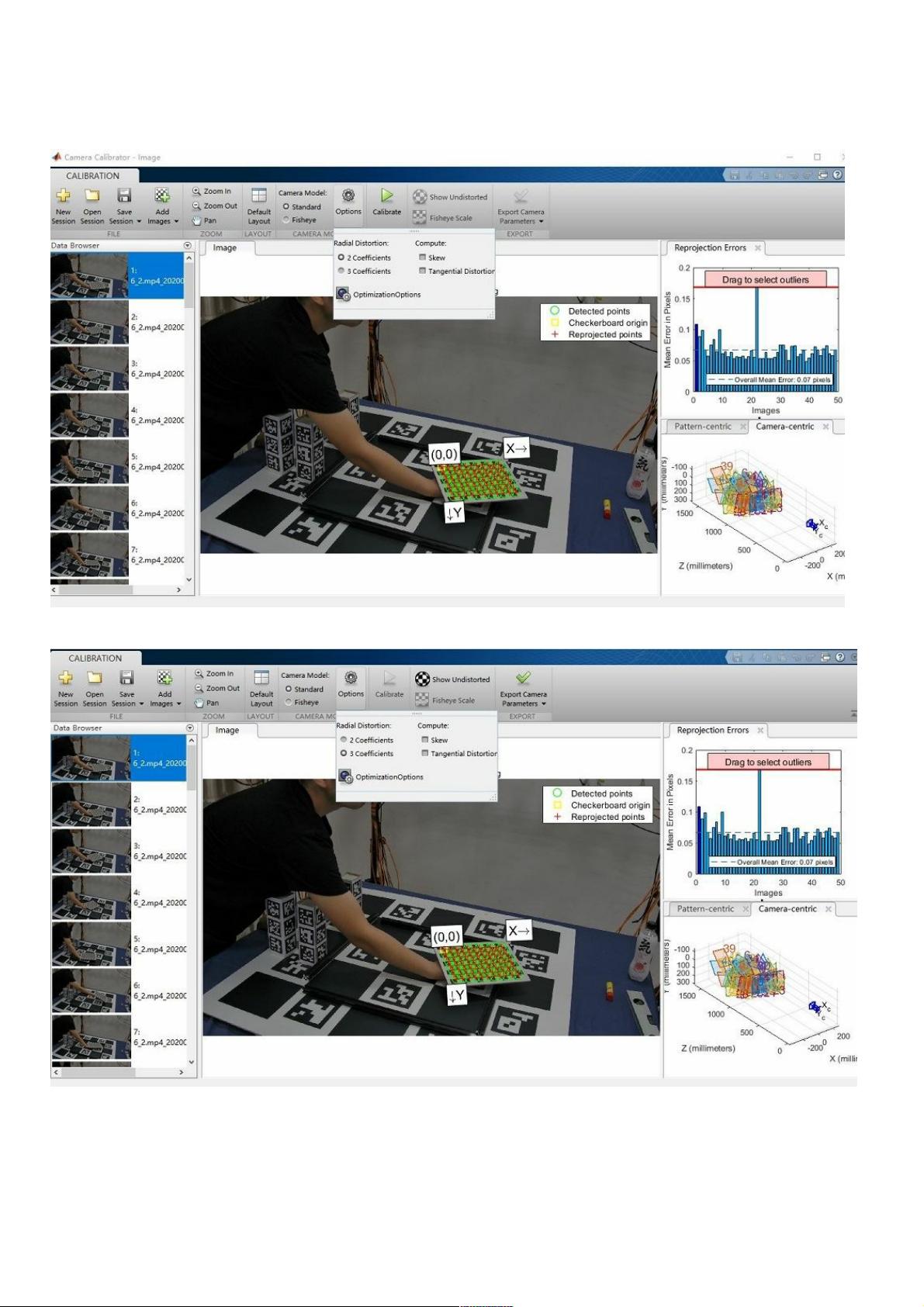
1 参数选择 径向畸变3个参数还是两个参数
默认两个参数
如果是三个参数
2准备转化生成结果
下载后可阅读完整内容,剩余4页未读,立即下载
1732 浏览量
1686 浏览量
565 浏览量
758 浏览量
2025-02-08 上传
206 浏览量
262 浏览量
点击了解资源详情

weixin_38708707
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android平台DoKV:小巧强大Key-Value管理框架介绍
- Java图书管理系统源码与MySQL的无缝结合
- C语言实现JSON与结构体间的互转功能
- 快速标签插件:将构建信息轻松嵌入Java应用
- kimsoft-jscalendar:多语言、兼容主流浏览器的日历控件
- RxJava实现Android多线程下载与断点续传工具
- 直观示例展示JQuery UI插件强大功能
- Visual Studio代码PPA在Ubuntu中的安装指南
- 电子通信毕业设计必备:元器件与芯片资料大全
- LCD1602显示模块编程入门教程
- MySQL5.5安装教程与界面展示软件下载
- React Redux SweetAlert集成指南:增强交互与API简化
- .NET 2.0实现JSON数据生成与解析教程
- 上海交通大学计算机体系结构精品课件
- VC++开发的屏幕键盘工具与源码解析
- Android高效多线程图片下载与缓存解决方案
