视觉惯性SLAM理论与算法详解
需积分: 0 41 浏览量
更新于2024-06-30
收藏 6.76MB PDF 举报
"7_27am_李明杨_Visual-Inertial SLAM 理论和算法1"
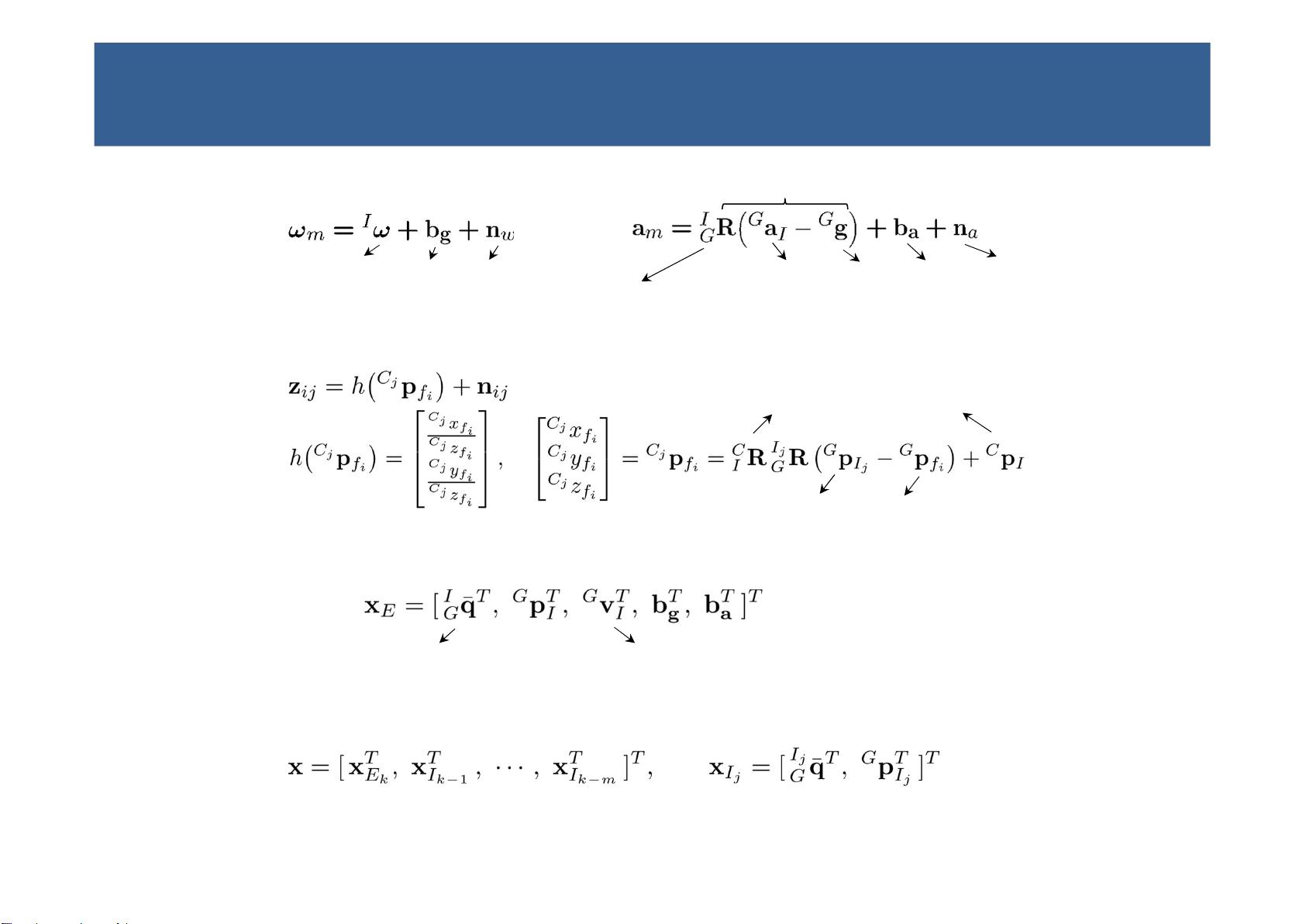
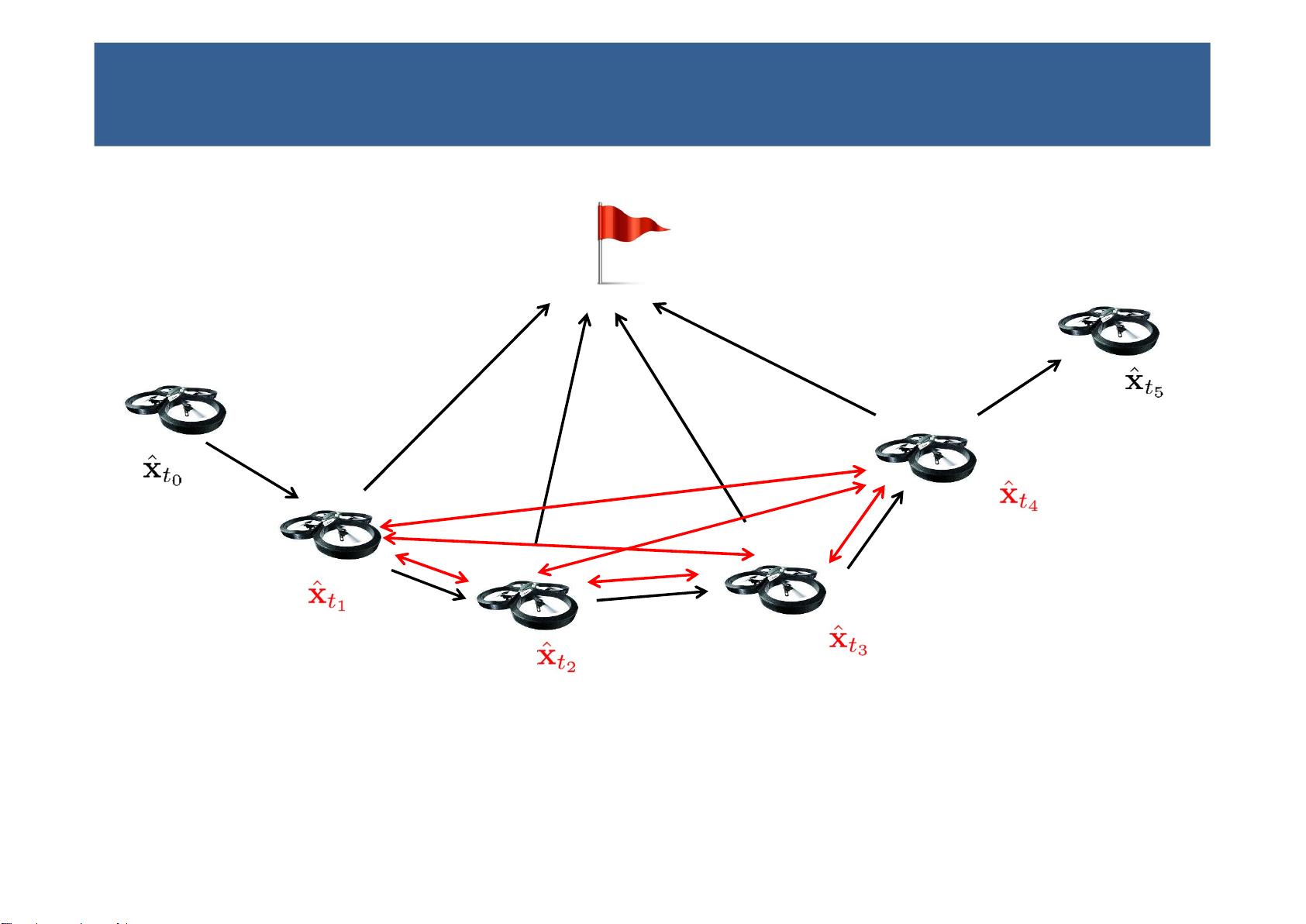
Visual-Inertial SLAM(视觉惯性同时定位与建图)是一种高级的定位技术,旨在在没有GPS信号或GPS信号受限的环境中实现高精度的3D定位。它结合了两种传感器:相机和惯性测量单元(IMU),以提供对平台运动的全方位感知。这种技术的关键在于,它不需要外部基础设施,设备小巧、轻便、低功耗且成本较低,因此广泛应用于无人机、机器人导航以及增强现实等领域。
IMU是 proprioceptive 传感器的一种,能够测量平台的运动状态,如加速度和角速度。而相机则属于 exteroceptive 传感器,用于捕捉周围环境的信息。将两者结合,视觉惯性系统可以提供连续的3D运动信息,实现自主导航。
SLAM(同时定位与建图)是Visual-Inertial SLAM的核心部分,其主要组件包括:
1. **Estimator Design**:
- **滤波器算法**:基于协方差或信息形式的滤波器,如卡尔曼滤波器或贝叶斯滤波器,用于实时估计系统状态。
- **迭代优化算法**:如因子图优化,通过多次迭代更新来最小化误差,提高定位和建图的精度。
2. **Visual Measurement Error Function**:
- **重投影误差函数**:这是基于几何的误差函数,通过比较图像特征在不同视图中的投影位置与实际观测到的位置之间的差异来评估定位准确性。
- **光度误差函数**:利用图像像素的亮度不变性,根据像素颜色的变化来估计相机的运动。
3. **处理Visual-Inertial Map**:
- **边缘化所有地图元素**:为了减小计算复杂性和存储需求,常用的技术是边缘化,即将不相关的地图元素从状态向量中移除,只保留对当前估计最有影响的部分,如视觉惯性里程计(Visual-Inertial Odometry,VIO)。
Visual-Inertial SLAM的当前阶段是已经在有限的应用中得到广泛应用,但仍然面临诸多挑战,例如传感器噪声处理、多传感器融合的优化策略、实时性能优化以及在动态环境中的鲁棒性问题等。随着技术的不断发展,Visual-Inertial SLAM有望在更多领域发挥关键作用,为无人系统提供更可靠、精确的定位服务。
Start to work on new hardware ?
Work on online datasets to validate your algorithm.
You need to buy IMUs and cameras.
–
If you are a lot of money: Buy bumblebee and Xsens.
–
If you do not want to spend any money: Use your cellphone.
–
If you work on specific AR/Robotic projects:
•
Off-shelf IMUs are pretty good: Bosch & InvenSense.
•
Select your camera based on your applications:
–
Fast moving v.s. slow moving.
–
Feature rich environment v.s. Features not enough.
–
Budget.
You start, but your code diverges or crashes:
– If timestamps are not obtained from hardware, they are not stable.
– Driver bugs are always possible (Even for companies like Google,
Qualcomm): random wrong timestamp, missing images, black images.
– Most popular bug: Wrong sensor extrinsic calibration.
13
剩余76页未读,继续阅读
2022-08-04 上传
2022-08-04 上传
2019-03-20 上传
589 浏览量
2018-05-22 上传
点击了解资源详情
点击了解资源详情

巴蜀明月
- 粉丝: 41
- 资源: 301
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
